
Daha önceki uydu tanıtımlarında hep radyo amatörlerine yönelik uyduları incelemiştim. Bu sefer de öyle, ancak bu; aynı zamanda amatör gökbilimcilerin de seveceği ve ilgilerini çekecek olan Japonya’nın Fukuoka Teknoloji Enstitüsü üretimi bir uydu formu olacak. İncelediğimiz küp uydu formu yeni fırlatılmadı ancak yazısı için ön test aşamalarının tamamlanmasını bekledim.
Nisan 2011’de başlayan proje ve sonrasında gerçekleşen başarılı fırlatmanın ardından nihayet 26 Kasım 2012’de ilk denemelere başladılar, sonrasında Japonya ve Kore’den ilk olumlu geri dönüşler alındı ve uydu da bizim yazımıza konu oldu.
Şimdi bunları bir kenara bırakalım ve uydunun hikayesine bakalım, sonra da bazı teknik donanımı hakkında bilgi verelim. Gökbilimcilerin için olan kısım ve yapacakları işlemler ise yazının sonunda yer almakta. İncelenen uydu adı FITSat-1 ya da nam-ı diğer NIWAKA.

Resim-1. Yörüngede ilk anlar, fırlatmanın hemen sonrası üç küp uydu. FITSat-1 en solda.
FITSat-1 (NIWAKA)’in Hikayesi
Uydu, 21 Temmuz 2012’de Tanegashima Uzay Merkezi (Tanegashima Space Center)’nden yola çıkan HTV-3 (Kounotori 3) kargo gemisi ile UUİ’ye ulaştırılmıştı. 27 Temmuz’da kargo gemisinin kenetlenmesinden sonra Japon astronot ve uçuş mühendisi Akihiko Hoshide KE5DNI tarafından Küçük Uydu Yörünge Fırlatıcısı (J-SSOD)’na yerleştirildi.
Ardından da UUİ‘nin Dünya’ya bakan Harmony Modülü’nün yan kapısından –Canadarm2 olarak da bilinen– Kanada üretimi Mobil Servis Sistemi (MMS) robotik kol ile alınarak diğer küp uydularla birlikte (sırayla WE-WISH, RAIKO, TechEdSat, NanoRack/F-1, FITSat-1) yörüngeye bırakıldı.
Diğer uydulardan WE-WISH çevrebilim çalışmaları için ek bir infraruj kamera, F-1 Yaesu VX-3R ve kamera taşımaktaydı. TechEdSat ise Iridium ve Orbcomm uydu telefon şebekeleri ile iletişim kuracak şekilde planlanmıştı. Ancak “Federal Communications Commission-FCC” lisansları zamanında gelmediği için bu özelliği devre dışı bırakılmak zorunda kalındı. TechEdSat da incelenecek ilginç bir uydu olacaktı ama sonuçta böyle bir şanssızlık yaşandı.
Video-1. Uydunun UUİ robot koluna bağlı J-SSOD ile uzaya bırakılışını gösteren video.
Video-2. Uydunun UUİ robot koluna bağlı J-SSOD ile uzaya bırakılışını gösteren değişik açıdan çekilmiş video.
04 Ekim 2012’de Uluslararası Uzay İstasyonu (UUİ)’ndan uzaya bırakılan FITSat-1, diğer uydulardan -Mors tabanlı ışık sinyali gönderecek olması- sebebi ile biraz farklı. FITSat-1 üzerinde ana haberleşme görevini üslenen donanım elbette bu değil, ancak şimdiye kadar denenmemiş deneysel bir çalışma olarak bu da alternatif bir başka haberleşme türü. Daha önce biraz farklı yapıda da olsa lazer deneylerinde LARES uydusu kullanılmıştı fakat o kendi gücüyle değil, yerden gönderilen lazer ışınını yansıtma prensibiyle çalışıyordu.
Gemiden gemiye, gemiden karaya ve bazen de karadan karaya yapılan ışıldaklı haberleşme türünü hatırlıyorsanız, bu FITSat-1 uydusunun optik çalışmasına iyi bir örnektir. Kaldı ki günümüzde de bu ışıldak haberleşmesi birbirine yakın mesafe seyreden savaş gemilerinde dahi kullanılmaktadır. Açıkçası bir sonraki adım Almanların İkinci Dünya Savaşı zamanında kullandıkları bir Li Spr 80 benzeri çalışma olursa şaşırmam.

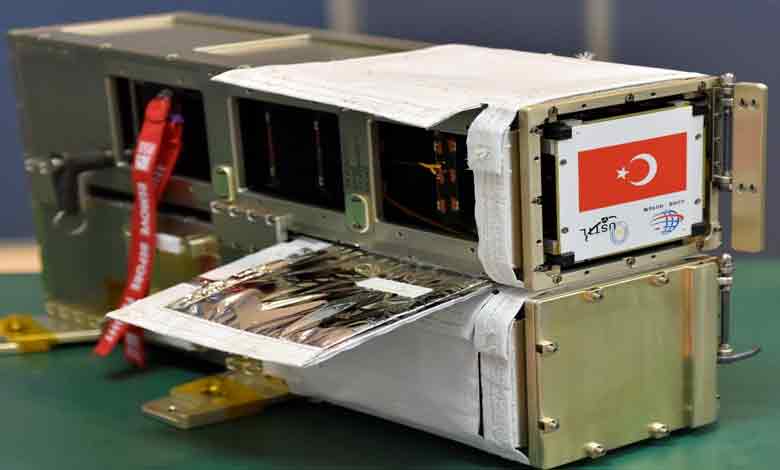
Resim-2. FITSat-1 (Niwaka) uydusunun genel yapısı ve dış görünüşü. Alt panelinde ışıklı haberleşmede kullanılan LED aydınlatmalar ve sembol olarak da “Niwaka maskesi” görülmekte. (Image Credit: FIT)
Bu tür küp uyduların küçük yüzeyleri olabildiğince faydalı amaçla kullanıldığından yüzeylerinde pek de logo, resim vb. bulunmaz. Ancak bu uydunun alt kısmında bulunan NIWAKA maskesi, Japonların esprili düşünceleri çerçevesinde düşünülmüş bir başka ayrıntı.
Uydunun ikinci adı olan “NIWAKA” ismi de zaten geleneksel Japon komedi oyunlarında kullanılan “Hakata Niwaka” maskesinden esinlenerek oluşturulmuş olup, “Hakata” ismi ise de Fukuoka şehrinin eski adıdır.
Video-3. Yüksek hızlı 5.8 GHz. verici sinyalinin SDR yazılımında görünüşü.
Genel Yapı
Tüm sistem 1U’luk standart bir küp uydu (Cubesat) formu içerisine yerleştirilmiş. Yüzeylerin her bir kenarı ise 10 cm. Ana donanım dış yapı içerisinde korunurken, dört yan yüzey güneş panelleri, diğer (alt ve üst) yüzeyler ise ek donanım (yama anten, kamera objektifi vb.) için ayrılmış durumda. Hangi dış yüzeyde (X,Y,Z) ne parçasının bulunduğuna kadar detaya girmemize sanırım gerek yok, zaten özellik arz eden hususlar resimlerden de kolayca anlaşılabiliyor.
Anten Sistemleri
Genelde bu tip uydularda anten sistemleri yaylı sistemler şeklinde gövdeye kilitlenir veya gövde üzerinde özel oluklara yerleştirilmiş şeritlerin serbest bırakılması şeklinde kullanılırken, FITSat-1’de bir servo/makara sistemi kullanılmış. Bu sayede fırlatmadan (Uİİ’den yaklaşık 30 dakika sonra UHF vericisi ile entegre çalışan zamanlayıcı tarafından servoya komut gönderilerek makara sisteminin sarılı 17 cm. lik antenin (dilin dışarı çıkarılması gibi) serbest bırakması sağlanmış.
1.2 GHz. ve yüksek hızlı (5.8 GHz) tek yönlü vericilerin Yer haberleşmesinde kullanılan anten ise zaten yama (patch) olduğu için bir açılma refleksine ihtiyaç duyulmamakta, anten gövde üzerinde mıknatıs ile sabitlemiş olarak görev yapmaktadır.
Uydu Güç Sistemi
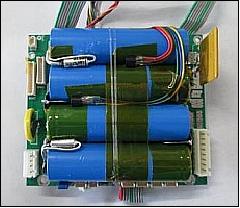
Resim-3. Pil bloğu. (Image credit: FIT)
Sistem; uydunun ana güç ünitelerine bağlı ve toplamda 2.3 Watt güç üreten güneş panelleri (Solar Power System), DC/DC dönüştürücü, biri (1X) sistem besleme, diğer üçü ise (3X) seri bağlı Hitachi Maxell INR18650PB2, 1450mAH lityum ion pillerden oluşmakta. Tekil pil, hızlı verici ve LED uygulaması dışında kalan sistemi, 3 pillik diğer grup ise LED ve 5,8 GHz. vericisi ile entegre çalışan kamera sistemini destekleyecek şekilde planlanmıştır.
Güneş pilleri ile öncelikli olarak bu tek pil şarj edilmekte, saha sonra da güç şarj için diğer üç pillik bloğa aktarılmaktadır. Tek pil 10 dakika boyunca FM vericisine sürekli güç sağlayabilmektedir. Bunun dışında sistem üzerinde bulunan bir IC tarafından da tüm elektrik güç sistemi, pillerin şarj ve deşarj durumları kontrol edilmektedir.
Birinci Yüksek Hızlı Haberleşme Sistemi 5,8 GHz. (Ana Görev)
FITSat-1’de ana görev haberleşme sistemi 5,8 GHz’te çalışan yüksek hızlı bir vericidir. Ana görev bölümündeki Jpeg destekli, VGA 640 x 480 pixel çözünürlüklü kameradan alınan görüntüler PIC ağılıklı (Yedekleme-CPU: PIC18F45J10, RX CPU: PIC16F1519, TX CPU: PIC16F1519) uçuş bilgisayarına bağlı bir kontrolör (PIC16F886) vasıtası ile bu haberleşme sistemine, ardından da yama (patch) anten ile 300 KHz band genişliği kullanılarak 5-6 saniye içerisinde Dünya’ya gönderilir.
Bu durumda iletim için 2 Watt’lık RF sinyalinin gönderilmesinde uydu güç sisteminden sağlanan yaklaşık 15 Watt’lık güç kullanılır.

Resim-4. Yüksek hızlı, 5.8 GHz verici yapısı. (Image Credit: FIT)
Bu modülün ana görevi geliştirilen yüksek hız vericisinin özelliklerini kullanarak hızlı bir şekilde sinyal iletimi sağlamaktır. Yapı bu nedenle 115.2 Kbps hızında çalışan FSK modulatörü ve 2 Watt doğrusal yükselticiden oluşmaktadır. Haliyle üzerinde bulunan kamera da yaklaşık 5-6 saniye sürede VGA (480 x 640) çözünürlüklü bir resmi Yer istasyonuna aktarabilmektedir.
Aslında başlangıçta uyduda 10 mW – 4 W arası güçte sinyal üreten bir yükseltici düşünülmüş, ancak 4 Watt’lık yükselticinin bir küp uydu için çok büyük olması sebebi ile uydu için 2 Watt çıkışlı lineer birleşimli yeni bir modül bu çerçevede geliştirilip kullanılmıştır.
Takdir edersiniz ki bir görüntünün aktarılması ile ses sinyalinin iletimi arasında gerek mesafeye bağlı olarak güç ve band genişliği gibi çok fark var. Diğer küp uydulara göre daha alçak yörüngede bulunması ve yüksek hızı nedeniyle etki eden Doppler etkisi de bir o kadar kritik. (5.8 GHz (5840.0 MHz) için (+/- 134 kHz., 437.250 MHz ve 437.445 MHz için ise (her ikisi de +/- 10 kHz) Yörünge demişken arada hatırlatayım, bu uyduların faydalı ömürleri 5-6 ay olarak belirlendi, görev bitimi Dünya çevresinde yörünge tutulumlarını kaybedecekler ve hızla atmosfere girip yanacaklar.
Video-4. Resim bilgisi taşıyan 5.8 GHz. yüksek hızlı verici sinyali. Ekrandaki uygulama SDR yazılımı olup, ekranda görünen frekans ara frekans (IF) 435MHz. sinyalidir.
5.8 GHz frekansındaki sinyali klasik amatör cihazlar ile doğrudan dinlemeniz neredeyse imkansız. Kenwood TS-2000 gibi bir cihazınız var ise 1.2 GHz. civarı frekanslar takip edilebilir ancak o sistem de uyduda sadece alıcı olarak çalışmakta.
Yine de mevcut frekans aralığınız da göz önüne alınarak farklı bir yöntem olan çevirici (converter) kullanarak bunu yapabilirsiniz. Zaten 5,8 GHz gibi yüksek frekanslarda bir sinyal işlemek için de sinyalin iletim hattında karşılaşılacak sorunlar vb. kaçınmak için genelde bu yöntem kullanılmakta. Örnek olarak 5.8 GHz çevirici (converter) için buradaki şemaya bakabilirsiniz.
İkinci Haberleşme Sistemi (70cm bandı)
Uydunun asli haberleşme sistemi olup aşağıda anlatılan acil durum sistemi ile desteklenmiştir. Yer istasyonundan gönderilen komutlar bu sistem tarafından alınıp işlenmekte, aynı zamanda klasik CW beacon ve telemetre vericisi olarak görev yapmaktadır.
Downlink : 437.250 MHz CW işaretçi (Beacon) (100 mW çıkış gücü) 437.445 MHz FM 1k2 AX25 (800 mW çıkış gücü) Formatı için buraya tıklayınız.
Uplink: 437.445 MHz FM 1k2 AX25 ile uzaktan komuta. Yer istasyonu da komutlarını yine aynı şekilde AX.25 paket protokolünü kullanarak 1200 bps hızında uyduya gönderir.
Çağrı işareti: JG6YEW
Üçüncü Haberleşme Sistemi (23cm Bandı 1.2 GHz.)
Bu sistemde 23 cm bandında ve 1.2 GHz frekansında bir alıcı sistem kullanılmış. Yapısı ve kullanım yeri olarak bu modüle bir anlamda yedek veya acil durum haberleşme sistemi de denilebilir. Çünkü uydunun yüksek hızlı haberleşme sistemi de tek yanlı olarak çalışmakta ve çektiği JPEG resimleri çok kısa bir zaman aralığında Yer’e göndermekte. Bu durumda asli çift yönlü haberleşme sistemi UHF modülüdür.
UHF alıcı-vericisine olası bir zarar geldiğinde ve/veya haberleşme bir şekilde bu modül üzerinden sekteye uğradığında, yer kontrol istasyonu tarafından gönderilen DTMF komutları 1.2 GHz alıcı ile alınıp decoderde kodları çözülerek ana işlem birimine gönderilmektedir.
Yörünge Bilgileri
Uİİ’nin yörüngesi ekvatordan 51,6 derece eğimlidir, bu nedenle FITSat-1 de aynı şekilde yörünge eğimli ve 51.6 derece güney enlemi ile 51.6 derece kuzey enlem arasında seyahat etmekte. Haliyle diğer küp uydular gibi 800 km yukarıdan değil Uİİ’ye paralel yükseklikte (yaklaşık 300 Km) seyretmektedir.
Kamera Sistemi

Resim-5. C1098 Modülü.
Uyduda C1098 JPEG Modülü kullanılmış. Bu modül ile gönderilen komut ile (veya yazılımda hangi aralıklarda çekim istenmiş ise) tek kare resim “VGA Image Sensor” tarafından yakalanır ve JPEG motoru tarafından sıkıştırılarak işlem yapılmak üzere bağlantı noktasına gönderilir.
Kendi üzerinde 460.800 bps hıza kadar destek sunabilen, modül ile bağlantı sağlandıktan sonra iletişim hızı kullanıcı tarafından değiştirilebilen, düşük güç tüketimli (3,3 V), mini ebatlı (20×28 mm) ve çeşitli lens seçenekleri bulunan C1098 modülü, bu tür çalışmalar için yeterli bir çözünürlük sunmaktadır. Zira uygulamadan istenen çekilen görüntünün Yer’e aktarılması olup, çok yüksek çözünürlük tercih edilmemiştir.
Telemetre
FITSat-1 standart Mors (CW) sinyali göndermektedir. Bu sinyal yapısında önce uydu kendi adını “HI geçerek bilgi vermekte ardından telemetre bilgisini yollamaktadır. Telemetre sinyali içerisinde genel anlamda iç gerilim, akım, batarya ve yüzey sıcaklıkları, zaman damgası vb. bilgileri barındırmaktadır.
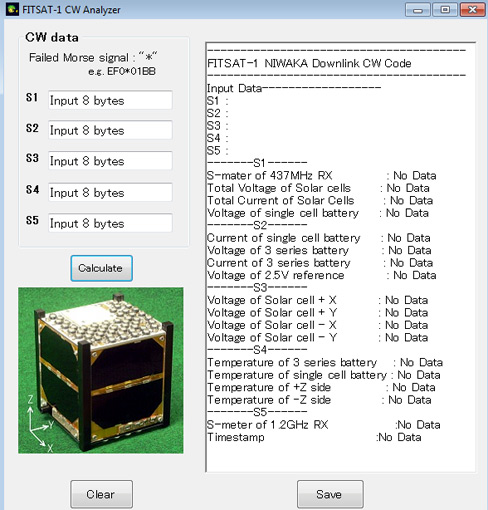
Resim-6. FITSAT-1 CW Analyzer ekranı.
Anlık takipte Mors ile alınan telemetre değerleri yukarıda resmini gördüğünüz yazılımın S-1 ile S-5 arasındaki alanlara doldurulduğunda “Calculate” tuşuna basarak hesapla derseniz, sağ tarafta açılımını size verecektir.
Mors kullanmaya alışıksanız (S1-5) değerlerini programa yazmak için hemen akıldan çözümleyebilirsiniz ancak değilseniz veya yeni amatör telsizci iseniz ve de otomatik takip sisteminiz de yoksa küçük bir destek almanın zararı yok.
Resmi görülen FITSAT-1 CW Analyzer yazılımını buradan indirebilirsiniz. Yazılımla uğraşamam derseniz onun da kolayı var. Buradaki web tabanlı sisteme aldığınız S parametrelerini girerek aynı şekilde çözmeniz mümkün.
Bunun için şöyle bir yol izlemeniz mümkün. Önce Mors (CW) verisini bilgisayarınıza kaydedersiniz. Daha sonra da küçük boyutlu “MRP40 Morse Code Decoder & Sender” gibi bir yazılımını veya yine anlık izlemede Fldigi gibi bir yazılım kullanarak dataları çözer ardından yukarıdaki yazılımın (S1-5) parametrelerine buları elle girer yine hesaplatırsınız.
Zaten Mors çözümlemede “S” anahtarlarına ait değerleri kolayca görmeniz ve birbirinden ayırmanız mümkün.
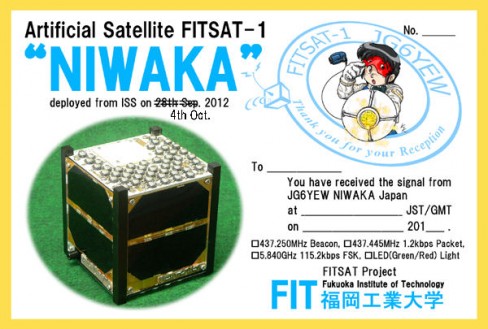
Resim-7. QSL kart örneği.
Telemetre açılımından sonra bu değerleri veya beacon ses kaydını dilerseniz FITSat-1 proje grubuna e-posta ile gönderip bir QSL kart alabilirsiniz.
Kamera Sisteminde Alınan İlk Resimler

Resim-8. Yer’e uydudan gönderilen ilk resim. (Image Credit: FIT)

Resim-9. J-SSOD’tan tam ayrılmadan sonra çekilen resim tabi ki daha net. (Image Credit: FIT)

Resim-10. Kamera objektifinden Dünyanın görünüşü. (Image Credit: FIT)
Yukarıdaki resimde uydunun üzerinde bulunan VGA kamera tarafından alınan ve yayınlanan ilk resimler görünmekte. ilk sıradaki fotoğrafa bakarsanız bulanıklık yanında, renk bozukluğu ve diğer kaymaları kolayca görebilirsiniz. Ancak dikkatli baktığınızda uydunun bu resmi fırlatma anında çektiğini de fark edebilirsiniz.
Görüntüdeki şekiller Uluslararası Uzay İstasyonu (UUİ)’nin devasa güneş panelleri ve taşıyıcı kolların bir kısmını içermekte. J-SSOD’nin kızağından ayrılırken küçük sarsıntılar kamerayı etkilemiş olmalı. Diğerleri ise ayrılmadan sonra çekildiği için daha net. Dünyanın göründüğü fotoğraftaki bulanıklık ise uydunun üzerindeki kamera modülünün resim yakalama (capture) hızından ve uydunun kendi ekseni etrafında dönerken çekmesinden kaynaklanmakta.
Genelde bu tür uydular fırlatıcı kutularından boşluğa bırakıldıkları anda üzerlerinde bulunan kontrol anahtarları sistemi aktif hale gelir. Bu küçük anahtarlardan birini yukarıda (2) numaralı resimde uydunun bize bakan öndeki köşe ayağının üzerinde görebilirsiniz.
Uydu fırlatma kutusundan belli bir emniyet mesafesi/zamanı ayrıldıktan sonra uçuş bilgisayarı tam anlamıyla devreye girer ve uydunun tüm fonksiyonlarını aktif hale getirerek antenleri açma komutu gönderir ve açar. Ancak resim modülüne ait olan anten yama anten olduğundan resim modülünün dolayı böyle uzunca bir bekleme yapmasına ihtiyaç duyulmamış.
Optik Deneyler / Işık İle İletişim (Alt Görev)
FITSat-1 uydusu, araştırmacıların uydular ile optik iletişim tekniklerini test edebilmelerine yardımcı olmak amacıyla, gece gökyüzünde ışıklı Mors kodlarıyla mesaj iletiminde bulunmaktadır. Uydu bir plan dahilinde alt ve üst panel yüzeyinde bulunan ve Power LED olarak adlandırılan güçlü LED’ler yardımı ile Morse kodu işaretçi sinyali (toplamda 200 Wattlık yanıp sönen ışık pulsları) göndermektedir.
Bu ışımalar Fukuoka Teknoloji Enstitüsü yer istasyonu tarafından teleskop ve anten bağlantılı fotoğraflama cihazı ile takip edilmektedir. Bu durum, Dünyadaki diğer gözlemciler için ise gökyüzünde yapay bir yıldızın parıldaması gibi görünmektedir.
Parlamaların gece açık ve bulutsuz havalarda küçük dürbünlerle de gözlenmesi mümkündür. Enstitü ise uydudan yayınlanan ışık sinyalleri ve zayıf ışık modlarını 5,8 GHz parabolik anten ile bağlantılı olan bir foto-multiplier donanımlı teleskop ile izlemekte.
Video-5. Işık parlamalarının Yer’den izlenmesi.
Resim-11. FITSat-1 çalışmasını yürüten Prof. Takushi Tanaka. (Image Credit: FIT)
Parlamaların bir plan dahilinde yapıldığını belirtmiştim. Bu aynı zamanda gereksiz yere elektrik gücünün harcanmasını da önlemektedir. Geniş alan kaplayan okyanusların üzerlerinden geçerken veya geçtiği alanda gözlemcilerden olumsuz (kapalı) hava raporları geldiğinde bu planda değişiklikler yapılmakta ve yine kendi web sayfaları üzerinden yapılan değişiklikler (“News” bölümünde “Flashing plan” olarak) anlık olarak gözlemcilerle paylaşılmaktadır.

Resim-12. İlk Yer’den izlemenin resimlerinden. (Image Credit: Prof. Jun-Ho Oh of Korea Advanced Institute of Science and Technology)
Amatör Gökbilimcilerin FITSat-1 Uydusunu Takip İşlemleri
Bu amaçla kullanacağımız Simone Corbellini tarafından geliştirilen web tabanlı yazılımın ismi Visual SAT-Flare Tracker 3D – Online. Yazılımın kullanımı ilk başta biraz karmaşık gelebilir baştan söylemeliyim.
Ancak alıştığınızda çok pratik ve hızlı olarak kullanabilirsiniz. Kullanmadığınız özelliklerin kapatılarak (ekranda gizlenerek) daha faydalı kullanım alanı oluşturmanız da mümkün.
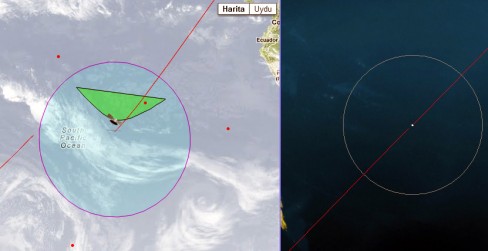
Resim-13. Yansıma alanı ve uydunun anlık konumu.
1. Önce http://www.satflare.com/ adresine gidin ve üyelik kaydınızı tamamlayın.
2. Daha sonra siteye girin ve en alttaki “Set Your Location” kısmına tıklayın ve bulunduğunuz yerin koordinat bilgilerini girin ve kaydedin. Veri giriş sırası enlem (Latitude), boylam (Longitude) ve deniz seviyesinden metre cinsinde yükseklik değeriniz şeklindedir. Bu işlemden sonra Google haritasında görünen ev (gözlemci) ikonu, bulunduğunuz yere taşınacaktır.
3. En üst menüden uydunuzu “FITSat-1 Flashing LED’s” olarak seçin.
4. Alt orta kısımda ikili harita güncellemesi tamamlandıktan sonra hemen haritaların üzerinde bulunan “Switch On Front Green Led’s” butonuna tıklayın.
5. Yukarıdaki resmin sol kısmında bulunan kırmızı çizgi uydu yörünge izini, mor daire yayın kapsama alanını, yeşil üçgene benzeyen alan ise yaklaşık 120 derecelik açıda LED’lerin yansıma alanını göstermektedir. Bu görüntüyü LED’lerin renklerine göre değiştirmek için “Switch On Front Green LED’s” ve “Switch On Rear Red LED’s” butonlarını kullanmanız mümkün.
Diğer Kullanıcı Kolaylıkları
Genç ve meraklı amatör gökbilim gözlemcileri için yazılımı biraz açıklamakta fayda olacağı kanatindeyim. Bu amaçla maddeler halinde onlar için bir kolaylık listesi oluşturmaya çalıştım. Uzman gökbilimciler bakımından ise zaten alışkın oldukları bir yazılım türü olduğu için okumaya ihtiyaç duymayabilirler. Yine de dikkat edilmesi gereken bir kaç husus için hızlıca bir göz atmalarını öneririm.
Resim-14. Gözlemci için değiştirilebilir ayarlar bölümü.
1. “Lock on satellite” kutucuğunu işaretlerseniz uydu yörüngesinde ilerledikçe haritanın ortasında sabitlenir.
2. “Process only the selected satellite” kutucuğunu işaretlerseniz sadece seçtiğiniz uydu ile işlem yaparsınız.
3. “Hide Obs/board” kutucuğunu işaretlerseniz alt kısımda bulunna gözlemci bilgi kısmını açıp kapatabilirsiniz.
4. Bu kutucukların hemen sağında bulunan “Observer” satırının devamında ise kendi koordinatınız görülmektedir.
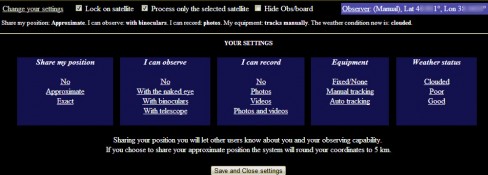
5. Gözlemci olarak bazı bilgileri paylaşıp paylaşmayacağınızı belirlemeniz mümkün. Satırın en başında bulunan “Change your settings” bölümüne girdiğinizde buradan Buraya tıkladığınızda pozisyonunuzun paylaşılıp paylaşılmayacağını (Share my position), gözlemci olup olmadığınızı (I can observe), kayıt yapıp yapmadığınız (I can record), ekipman (Equipment) ve hava durumu (Weather status) bilgilerinizi değiştirebilirsiniz. Bu değişiklikler her bölümün kendi hücresi içinde alt alt maddelendirilmiş değerleri seçmeniz şeklindedir.
6. Eğer konum bilginizi göstermek istiyor ancak tam ve net koordinat bilgilerinizi paylaşmak arzusunda değilseniz ilk seçenek olan “Share my position” bölümünde “Approximate” seçeneğini seçin. Bu taktirde yazılım net konum bilginizi yaklaşık 5 km.lik bir alan için yuvarlayacaktır.”İşlemleri kaydetmek için “Save and Close settings” butonuna tıklamayı unutmayınız. Tüm bu adımlar tamamlandığında hemen üst satırda sizin son durum bilgileriniz görünür.
Örnek: “Share my position: Approximate. I can observe: with binoculars. I can record: photos. My equipment: tracks manually. The weather condition now is: clouded.”
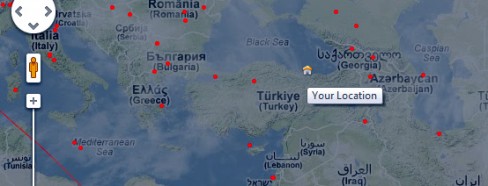
Resim-15. Yer gözlemci konumları.
7. Harita üzerinde görünen “kırmızı noktalar” sisteme kayıtlı olan gözlemci konumlarını göstermektedir. Fare işaretçisini bu kırmızı noktaların üzerine getirdiğinizde yukarıda belirttiğim gibi bilgileri paylamış olan gözlemcilerin konum, rumuz vb. bilgilerini görmeniz mümkündür. Ben yazıyı hazırladığımda benimle birlikte kayıtlı toplam 712 gözlemci üyeliği vardı ve 512 üye aktif olarak sitedeydi.
8. Önümüzdeki zamanlarda geçiş tahmini için gözlemci ekranında iken; “Predict Passes” butonuna tıklandığınızda görebileceğiniz 5 günlük geçiş tahminleri ve en sonda önerilen izleme araçları listesi aşağıdaki resimde görülmektedir. Listenin en sağındaki görünürlük “Visible” kısmındaki renkler pratik anlamda bir bakışta size yardımcı olacaktır ki yeşil renk en uygun zaman ve açı değerlerini içerir. Eğer visible sütununda satır değeri yeşil renkli ise “Best Time” kısmındaki zaman değeri en iyi gözlem saatini, “Mag” ise kadir cinsinden LED parlaklığını ifade edecektir.
9. Yine bir hatırlatma yapayı ki sonradan gözlemciler boş yere beklettin bizi diye bana kızmasın. Saat değerleri Türkiye saati (TSİ) değil uluslararası zaman (UTC) zaman birimine göredir. Kendi bilgisayarınızın saati ile Google haritasının üzerindeki saati karşılaştırırsanız aradaki zaman farkını gözleyebilirsiniz.
10. Butonlarda “Predict flare” butonuna tıkladığınızda çıkan liste aklınızı karıştırmamalı. FITSat-1 uydunun büyük güneş panelleri olmadığı için bu parlama tahmin “Predict flare” özelliğini kullanmanız hatalı olacaktır. Bu tür seçenekler genelde büyük güneş panelli uydular (Iridium vb.) için kullanılmaktadır. Bu şekilde yapılan gözlemlerde Güneş ışığının uydudan Dünyaya yansıması hesaplanarak bir gözlemci tahmin zaman listesi oluşturulur ancak FITSat-1 yukarıda da dediğim gibi hem küçük bir uydudur hem de kendi ışığını kendi yayınlamaktadır. Zaten “Predict flare” listesine tıklasanız da sorgu sonucu boş döndürülecektir.
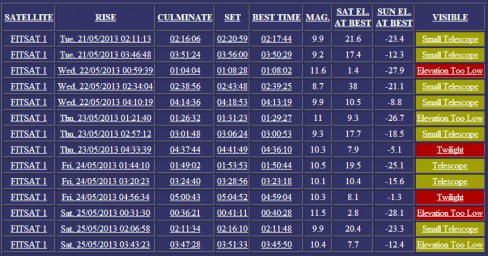
Resim-16. Gözlemci için geçiş tahminleri ekranı.
11. Gözlemi kolaylaştırmak adına gökyüzüne aşina iseniz gökyüzü grafiği (Sky Chart) kısmını da kullanabilirsiniz. Bu sayede geçiş istikametini gökyüzüne bakarak bulmanız kolaylaşacaktır.
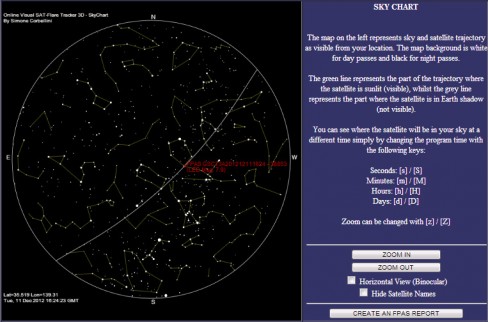
Resim-17. Sky Chart ekranı.
12. Bu arada siz fare imleci ile grafik üzerinde gezindiğinizde, sağ üstteki “Azimuth” ve “Elevation” değerlerinin değiştiğini de görebilirsiniz. Grafiğe gece kullanıyorsanız arka planının siyah, gündüz ise beyaz olması gerekir. Eğer zamana göre tam tersi görünüyor ise anlık izlemeden çıkmış olabilirsiniz. Bunun için “Real Time Tracking” butonuna bir kere basmanız yeterlidir. Harita aktif iken zamansal değerleri kolayca değiştirmek istiyorsanız, klavyenizden gün için (D), saat için (H), dakika için (M), saniye için ise (S) tuşlarını kullanabilirsiniz. Harfleri kullanırken büyük küçük harf fark etmemektedir.
13. Dilerseniz aynı sitede gözlemleriniz ile ilgili yapay uydular için en iyi posizyon (Fine Position of Artificial Satellites-FPAS) raporlarından da hazırlayabilirsiniz. Burada gördüğünüz örnek FPAS raporuna bakarsanız altta gözlemcinin çektiği parlama resmini de görebilirsiniz. Yukarıdaki gözlem bilgilerini ve resmi inceledikten sonra raporun sonunda bulunan “View This Event In the Online 3D Tracker” butonuna tıklarsanız bu kez gözlemcinin rapor düzenlediği zamanki uydunun konum bilgilerini görmeniz de mümkündür.
14. Kendi gözleminize döndüğünüzde yine “Real Time Tracking” tıklamayı unutmayın.
Sanırım bu bilgiler optik anlamda gözlem yapacak olan amatör gökbilimciler için yeterli gelir. Eğer resim çekme imkanınız olur ise yazıya eklemek için göndermenizi isterim.
…
Yazının sonunda bazı haylaz arkadaşlarımın yazıyı hazırlarken sırf beni kızdırmak için “ne var ki bu küp uydularda bu kadar çok seviyorsun, her tarafı teknik bilgi olsa ne olmasa ne, minnacık içi dışı görünen bir uydu işte” dediklerini hatırladım.
Haklı oldukları tek konu var ki, o da küp uyduların küçüklüğü. Lakin burada da gördüğünüz gibi tümü iki avucunuzun içerisine sığacak kadar bir minik bir uyduda anlatılacaklar yazmakla bitmiyor. Bu görünen yüzü, madalyonun bir de diğer yüzüne bakmak gerek.
Her bir uydu yukarı çıktığında mükemmel derecede çalışmak zorunda, işte bu nedenle yazımızdan çok daha uzun süren prosedürler, buraya yazmadığım bir sürü testler sürüp gitmekte.
Eğer çalışmaz ise ben burada bir kaç günlük yazı hazırlama emeğimi, siz ise 20 dakikalık okuma zamanınızı kaybedersiniz. Ama bu uyduları yapanlar 1-5 yıl arasında değişen onca emek, zaman, alın teri ve iş gücünü de beraberlerinde kaybederler.
Neyse…Bu sefer yazı sonunda bir değişiklik yaptım ve aşağıya üç basit soru ekledim. Dilerseniz yorum kısmından soruları madde numaralarını yazarak cevaplayabilirsiniz.
Sizlerden gelen cevapları bir hafta sonra doğru cevapları ile birlikte yayınlarım 🙂 Böylece kendi cevabınızı da kontrol etmiş olursunuz. Başka bir uydu incelemesinde görüşmek üzere.
Tahmin Soruları
1. Biz kuzey yarımküreden hangi renk ledleri görebiliriz, neden?
2. Uyduda neden çok daha güçlü ve hızlı örneğin bir ARM yerine PIC kullanılmıştır?
3. Uİİ’den bırakılan 5 küp uydunun ileride Uİİ ile çarpışma olasılığı var mıdır, neden?
Kaynaklar:
http://www.pe0sat.vgnet.nl/satellite/cube-nano-picosats/fitsat-1
http://www.fit.ac.jp/~tanaka/fitsat.shtml
http://www.fit.ac.jp/~tanaka/
http://www.jaxa.jp/about/centers/tnsc/index_e.html
http://www.nasa.gov/mission_pages/station/research/experiments/J-SSOD.html
http://en.wikipedia.org/wiki/Harmony_(ISS_module)
http://en.wikipedia.org/wiki/Akihiko_Hoshide
http://en.wikipedia.org/wiki/International_Space_Station
http://en.wikipedia.org/wiki/AX.25

Bu konular hakkındaki eksik bilgilerimin de bir kısmını tamamlamış bulunmanın mutluluğunu yaşıyorum. Paylaşım için teşekkürler. Tek kelimeyle şahane.
Bu bilgilere ulaşmak için saatlerce İnternet’te araştırma yapmak lazım, burada hepsi sunulmuş. Merak edip takip etmek isteyenler için bulunmaz bir kaynak. Süper bir yazı, emeğinize sağlık. Selamlar