
Mars çalışması olur da, herkesin aşina olduğu İzci (Rover) çalışması olmadan olur mu? YM7XKA’nın Lokal Mars Projesi (LMP)’de habitat ve astronot çalışmalarından sonraki aşamalarından biri de Mars Rover uygulamasıydı. Bu proje kapsamında öngörülen İzci sistemi, Curiosity kadar büyük ve bilim laboratuvarı şeklinde bir misyon üslenmedi. Bunun yerine çalışma sistemi olarak büyük ve tek bir robotik keşif aracının çalışmasından ziyade birden fazla küçük keşif robotlarının bir arada çalışması şeklinde bir yapı öngörülerek gerçeklendi.
İzci çalışmasında belli ana yapıların sıfırdan üretiminden ziyade bunların hazır alınarak, aslen faydalı yük (payload) içerisinde yer alacak olan elektronik sistemlerine, izci sürüş metodlarına, komuta kontrol ve keşif bilgisi toplama olanaklarına iş ve personel gücü odaklandırıldı. Bu konuda aşağıda görülen malzemeler geçtiğimiz haftalarda sipariş edilmiş olup, elimize geçtiğinde sistemlerin montajından sonra planlandığı şekliyle faydalı yük (payload) çalışmalarına başlanılacaktır.
Halen Mars yüzeyinde görev yapmakta olan keşif araçları görece pahalı, ağır sistemlerden oluşmakta ilk etapta insanlı uçuş öncesi bir çok konuda keşif yapmakta ve bilgi toplamaktadır. Ancak mars gibi devasa bir gezegen yüzeyinin ileride koloni kurulmasıyla birlikte hızlı bir şekilde keşfi, topoğrafik çalışmalar ve arazi analizlerinin yapılması tek bir robotla yürütülmesi oldukça zaman alacaktır. Bu nedenle öngörülen senaryo gereği insanlı yerleşimin başlamasından sonraki aşamada devreye girmesi öngörülen İzci sistemimiz, kısa zamanda çok daha geniş bir alanın keşfine olana sağlayacaktır.

Resim-1. Havuzlu çıkartma gemisi.
Çoklu sistemde yukarıdaki resimde de bir örneği görülen havuzlu çıkarma gemileri modeli baz alınmıştır. Bu büyük gemiler içlerinde bulunan havuz sistemi ile taşıdıkları botları, çıkartma bölgesine kadar beraberinde götürmekte ve tip ve modeline göre arka veya yandan ayrılan botlar içindeki personelle birlikte müstakil olarak kıyıya sevk edilmektedir.
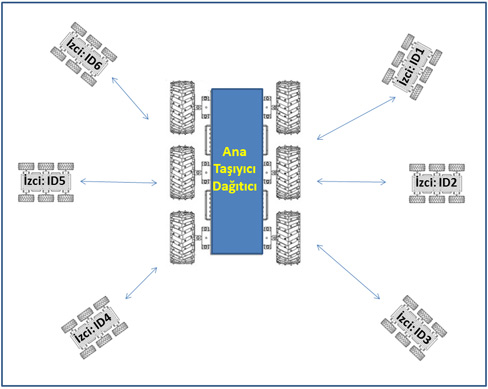
Resim-2. Ana taşıyıcı + dağıtıcı sistem ve ve İzci’ler.
Senaryoya göre; böyle bir uygulamada küçük ebatlı İzci’ler personel taşıyan keşif araçları ile birlikte araştırılması gereken bölgelere kadar sığınmacı olarak taşınmakta burada ana taşıyıcıdan ayrılarak önceden tanımlanmış bölgelere sevk edilmektedir. Personel dilerse normal şartlarda otonom şekilde keşif görevlerini icra eden bu İzci’lere müdahale edip manuel kontrole geçebilmektedir.
Bu tür bir sistem ile neler yapılabileceğine dair pek çok fikir üretilebilir. Bazılarını özetlemek gerekirse;
1. Donanımları gereği bu küçük izci’lere astronotların yüzey araştırmaları esnasında “beni takip et” (Follow me) görevi verilebilir, astronotların çukur alanlara girmesi ve ufki görüş kaybı durumunda krater başında bekleyen İzci, üzerindeki mini tekrarlayıcılarla (röle) ana taşıyıcı arasında haberleşme rölesi görevi görebilir,
2. Astronotların araştırmaları esnasında lokal ve çevresel radyasyon ölçümleri veya anlık meteorolojik ölçümler yapabilir,
3. Astronotların yüzeye inmeden aynı anda bir çok noktaya İzci’leri sevk etmesi sayesinde çok hızlı ve geniş alandan bilgi toplanabilir,
4. Robotik çalışmalar olması nedeniyle astronotların ana taşıyıcı içerisinde kalarak daha az radyasyona maruz kalmalarına, daha çok oksijen tüketmelerine ve yorulmalarını engelleyebilir,
5. Ulaşılması, girilmesi riskli bölgelerde insanlı keşif görevlerinin bir bölümünü üstlenebilir,
6. Elektrik gücü sağlayan bataryaları şarj edilemeyip kritik seviyeye indiğinde ya da ana dağıtıcı yapı ile iletişim kopukluğu yaşandığında komut beklemeksizin otomatik olarak “eve dön” rutinini işleterek dağıtıcıya dönebilir,
7. Aynı geniş alanda görev yapacak olan ana taşıyıcı veya büyük keşif araçlarının lojistik ve ikmal maliyetlerini azaltabilir, gerektiğinde kaybı göze alınabilir sistemler şeklinde çalışabilirler.
İşte üzerinde çalışılacak olan 6 İzci’den biri de bunlardan biri olacak. Bir adet üretilecek sistem üzerinde bütün varyasyonlar denenecek ve tecrübe edinilecek. YM7XKA Kulübü öğrencilerince bu konular üzerinde araştırma yapmaları için öngörülen gerçek sistem boyutu kadar olan bir İzci yapısı için aşağıda resmini gördüğünüz 6 tekerlekli bir sistem planlandı ve sipariş edildi. Komuta kontrol, canlı video görüntüsü aktarıcı, konum belirleyici ve sensörlerden gelecek veriyi telemetre olarak aktaracak tüm sistem bu yapı üzerine inşa edilecek. Arkadaşlarımıza şimdiden bu tür İzci sistemlerinin sürüşü ile ilgili teknikleri aktarmaya başladık.

Resim-3. İzci sistemi.
12 cm çapındaki her bir tekerinde 34:1 dişli oranına sahip, bağımsız salıncak amortisörlü, rediktörlü ve güçlü birer motor bağlantısı olan (6×6) taşıyıcı sistemimiz; 43 cm boyunda ve yaklaşık 3 kg. yüksüz ağırlıkta. Üst yüzeyinin alüminyum ızgara şeklinde olması yapılacak payload çalışmalarının da yüzeye montajını kolaylaştırmakta.

Resim-4. İzci sisteminin faydalı yükümüzü taşıyacak olan iskelet yapısının genel görünümü.
Kullanım durumuna göre oldukça hızlı hareket edebilen sistem, 7-12 Km/s arasında hız yapabilmekte. Ancak uygulamada bu denli yüksek hızdan ziyade göreve odaklı hızlarda çalışılacak. Merak edenler sistemin hız ve kabiliyetlerini gösteren örnek videoyu aşağıdan izleyebilirsiniz.
httpv://www.youtube.com/watch?v=T3Qm3PCMLIY
 İzcinin kumanda sistemi birinci aşamada görsel olarak gerçekleştirilecek. Bu nedenle 2.4GHz. frekansında çalışan 5 kanallı bir alıcı ve verici modülü tercih edildi. İkinci aşamada geliştirmelere paralel olarak düşünülen sistem ise çok daha farklı bir yapıda olacak. Payload sistemi tamamlanana dek bu kumanda sistemi ile İzci sürücüleri de alıştırmalarına devam edecekler. Her ne kadar görsel kumanda olarak düşünülmüş olsa da bir plan dahilinde video aktarım ile uzak mesafe sürüş konularında da tecrübe kazanmaları sağlanacak. Buradan kazanılacak tecrübe daha sonra çalışmalar aşama aşama geliştirilecek.
İzcinin kumanda sistemi birinci aşamada görsel olarak gerçekleştirilecek. Bu nedenle 2.4GHz. frekansında çalışan 5 kanallı bir alıcı ve verici modülü tercih edildi. İkinci aşamada geliştirmelere paralel olarak düşünülen sistem ise çok daha farklı bir yapıda olacak. Payload sistemi tamamlanana dek bu kumanda sistemi ile İzci sürücüleri de alıştırmalarına devam edecekler. Her ne kadar görsel kumanda olarak düşünülmüş olsa da bir plan dahilinde video aktarım ile uzak mesafe sürüş konularında da tecrübe kazanmaları sağlanacak. Buradan kazanılacak tecrübe daha sonra çalışmalar aşama aşama geliştirilecek.
Mini kaşif İzci’de toplamda 6 tekerin hepsinde de motor bulunmakta. Bu nedenle dönüşler ise sol ve sağ 3 lü teker bloklarının birbirinin tersine döndürülmesi veya bir tarafın frenletilmesi ile sağlanmakta.
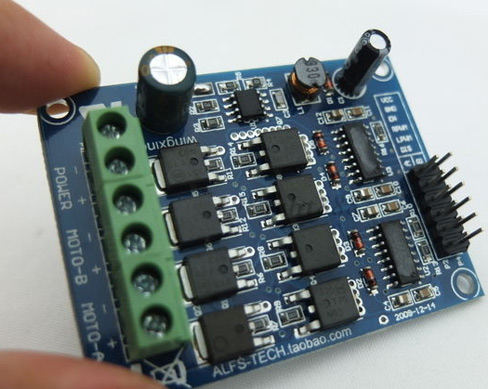
Bu konuda motor sürücüsü olarak iki teker bloğunu kontrol edebilmek maksadıyla “DC 3V-15V 50A Dual-channel H bridge Motor Driver Module for Arduino Robot Servo” sistemi öngörüldü.

Resim-5. Video alıcı verici kitinin görünümü.
İzci üzerinden merkeze video aktarım için sipariş edilen malzeme ise resimde görülen donanımdan oluşmakta. Bu faydalı yük içerisinde bir VGA kamera, alıcı verici sistemler, alıcı-verici antenler, montaj ve güç kablolarından oluşmaktadır. İzci sistemi ile ilgili şimdilik bu kadarını paylaşabiliyorum. İleriki zamanlarda gelişmeler bilahare paylaşılacaktır. Dilerseniz sizlerde yorumlarınız ile bu konuda çalışma yapacak arkadaşlarımıza destek olabilirsiniz.
Yazı dizisinin diğer bölümleri:
Lokal Mars Projesi (LMP) 1.Bölüm / (Google Translate – English Lang.)
Lokal Mars Projesi (LMP) 2.Bölüm / (Google Translate – English Lang.)
Lokal Mars Projesi (LMP) 3.Bölüm / (Google Translate – English Lang.)
Lokal Mars Projesi (LMP) 4.Bölüm / (Google Translate – English Lang.)
Lokal Mars Projesi (LMP) 5.Bölüm / (Google Translate – English Lang.)
Lokal Mars Projesi (LMP) 6.Bölüm / (Google Translate – English Lang.)
Lokal Mars Projesi (LMP) 7.Bölüm / (Google Translate – English Lang.)
Lokal Mars Projesi (LMP) 8.Bölüm / (Google Translate – English Lang.)
Lokal Mars Projesi (LMP) 9.Bölüm / (Google Translate – English Lang.)
Lokal Mars Projesi (LMP) 10.Bölüm / (Google Translate – English Lang.)
Lokal Mars Projesi (LMP) 11.Bölüm / (Google Translate – English Lang.)
Lokal Mars Projesi (LMP) 12.Bölüm / (Google Translate – English Lang.)
[…] English Lang.) Lokal Mars Projesi (LMP) 10.Bölüm / (Google Translate – English Lang.) Lokal Mars Projesi (LMP) 11.Bölüm / (Google Translate – English Lang.) Lokal Mars Projesi (LMP) 12.Bölüm / (Google […]
[…] English Lang.) Lokal Mars Projesi (LMP) 10.Bölüm / (Google Translate – English Lang.) Lokal Mars Projesi (LMP) 11.Bölüm / (Google Translate – English Lang.) Lokal Mars Projesi (LMP) 12.Bölüm / (Google […]
[…] English Lang.) Lokal Mars Projesi (LMP) 10.Bölüm / (Google Translate – English Lang.) Lokal Mars Projesi (LMP) 11.Bölüm / (Google Translate – English Lang.) Lokal Mars Projesi (LMP) 12.Bölüm / (Google […]
[…] English Lang.) Lokal Mars Projesi (LMP) 10.Bölüm / (Google Translate – English Lang.) Lokal Mars Projesi (LMP) 11.Bölüm / (Google Translate – English Lang.) Lokal Mars Projesi (LMP) 12.Bölüm / (Google […]
[…] English Lang.) Lokal Mars Projesi (LMP) 10.Bölüm / (Google Translate – English Lang.) Lokal Mars Projesi (LMP) 11.Bölüm / (Google Translate – English Lang.) Lokal Mars Projesi (LMP) 12.Bölüm / (Google […]