
1. AMAÇ ve KAPSAM
1.1 Amaç
Bu çalımanın amac Ankara Üniversitesi Kreiken Rasathanesi’nde bulunan Radyo Teleskop antenini tekrar faal hale getirmeye katkı sağlamaktır. Çalışmaların amacı radyo teleskobun olabildiğince orijinal halinin muhafaza edilerek, ihtiyaç duyulan noktalarda modernizasyonlar uygulayarak tüm sistemi tekrar faal hale getirmektir.
Anten üzerinde yaptığımız ilk gözlemde, antenin dipol kısımlarının bütünselliğinin tamam olduğunu, motor kısımlarının bütünselliğinin de tamam olduğunu gördük. Fakat fonksiyonlarının tam olup olmadığı hakkında elimizde bir bilgi ve gözlem yoktu. Antenin aktif hale getirebilmek için iki takım oluşturduk. Bunlardan birincisi mekanik kısımlarını aslına eş olarak aynı fonksiyonları yerine getirebilecek şekilde çalışmasını sağlamak, ikincisi ise anten kısmını inceleyerek çalıştırılmasını yada daha geniş kapsamlı gözlemler için ilaveler/düzenlemeler/ değişiklikler yapma üzere çalışmalar yapmak amacındadır.
1.2 KAPSAM
Bu doküman kapsamında antenin mekanik yapısının çalışma prensipleri anlatılacak ve mekanik yapının orjinalindeki hareketleri yeniden yapabilmesi için yapılan çalışmalar ele alınacaktır.
2. DÖKÜMANA GENEL BAKIŞ
2.1 İLGİLİ DOKÜMANLAR
Rasathane doküman arşivinden alınan sitem tanıtım dokümanları referans olarak kullanılmış olup, dokümanların içeriğinde antenin mekanik yapısının öalışması konusunda herhangi bir detay bilgiye rastlanmamıştır.
Antenin ve elektronik sistemlerin üretiminin 1950-1960’lı yıllarda NEDERLAND TELEKOM tarafından yapılmıştır, internet araştırmalarında benzer sistemlere rastlanmış olsa da bu antenin bşrebir benzerine denk gelinememiştir.
2.2 TANIMLAR
Yoktur.
2.3 KISALTLAMALAR
| Kısaltma | Açıklama |
| AC | Alternative Current |
| Hz | Hertz |
| VAC | Voltage Altrnative Current |
3. SİSTEME GENEL BAKIŞ
Prof. Dr. Egbert Adriaan Kreiken’in hatırasına saygı için öncelikle ana amacımızın antenin ana yapısının bozulmamasını sağlama olması kararını aldık.
Motor ve hareketli kısımlar üzerinde yaptığımız gözlem, onarım ve bakımlarda dikkatimizi çeken önemi bir husus, mekanik sistemin tüm vida ve hareketli parçalarının paslanmaz malzemeden üretilmiş olması idi (pirinç vs). Bu da mekanik sistemi uzun yıllara rağmen korozyona uğramamasını sağlamıştır.
İlk önce tüm hareketli mekanik sistemi kimyasallarla temizleyip yağlayıp hareketlerin daha yumuşak ve sarsıntısız olmasını sağladık. Elde edilen kısıtlı dokümanlarda da mekanik sistemi periyodik olarak bakımının yapılmasından söz edilmektedir.
Elektrik ve elektromekanik kısmının incelenmesi, varsa arızalarının giderilmesi işleri kapsamında;
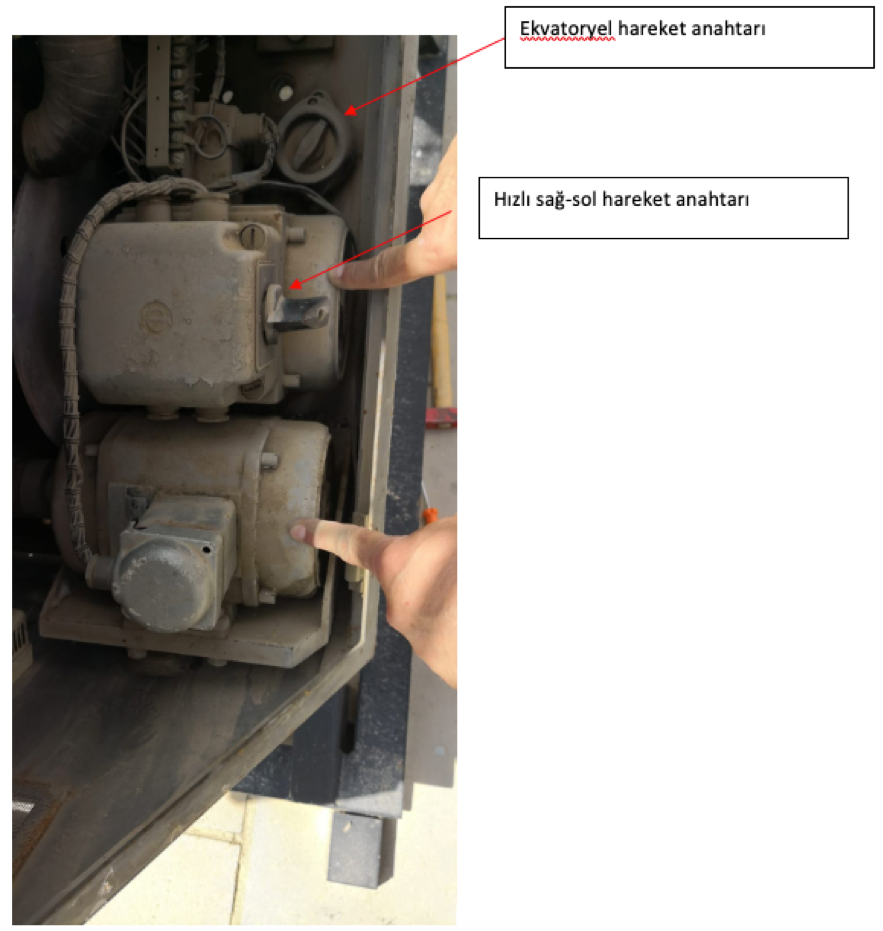
Sistem üzerinde iki adet motor olduğu ve bunlardan sağ tarafta yer alanının ekvatoryal ve güneş senkron hareketi sağlayan motor olduğu görülmüştür. Solda yer alan motorun ise anteni hızlı olarak ileri ya da geri hızlı hareketle istenilen pozisyona getirilmeyi sağladığı görülmüştür.
Motorların 50Hz şehir şebekesini senkronlamak amacıyla kullandığı ve hazırlanan dişli tertibatları ile güneşin hareketine esenkron bir hareketin sağlandığı belirlenmiştir.
Anten güneş gözlemi amacıyla tasarlandığı için ekvatoryal hareketi bulunduğu yerden batı yönüne doğru yapmaktadır. Yaptığımız kontrolde ekvatortal hareketin tüm fonksiyonlarının çalıştığını gördük ve test ettik.
Sistemin kapakları üzerinden birine kabartma/kazıma olarak çizilmiş olan bağlantı blok şeması görünümü aşağıdaki şekildeki gibidir;
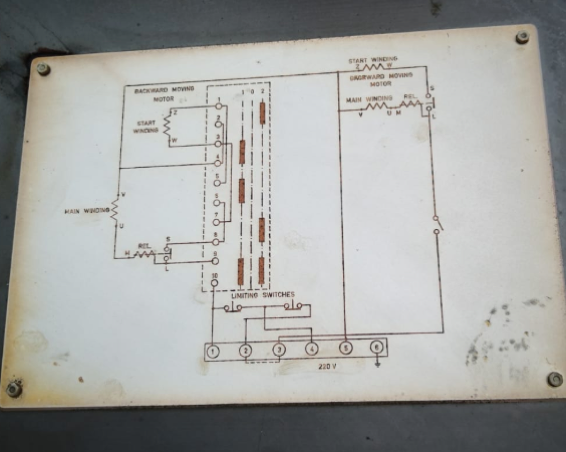
Şekil 1 Orijinal Motor ve Anahtar Şeması
3.1 GÜNEŞ SENKRON Ekvatoryal Hareket
Ekvatoryal hareket sağlayan mekanik yapının blok şeması aşağıdaki gibidir;
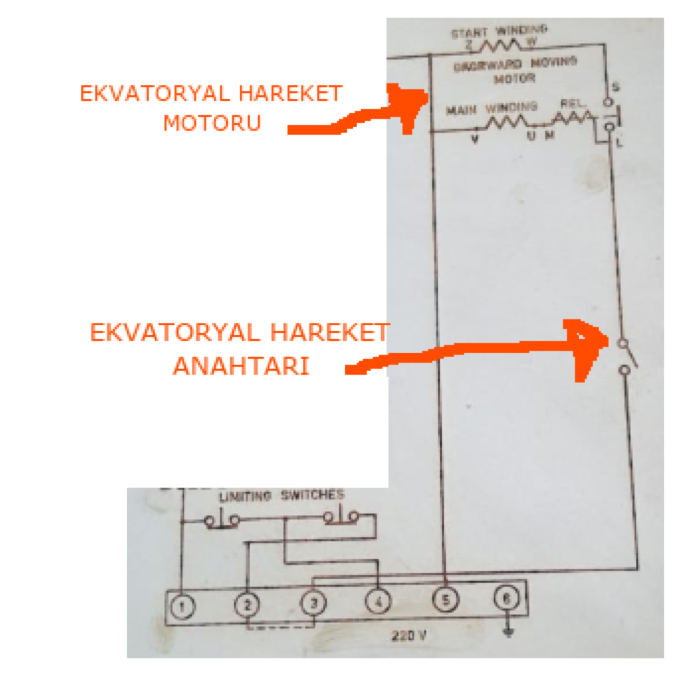
Şekil 2 Ekvatoryal Hareket Blok Şeması
Ekvatoryal hareket şekilde görülen AC motorun öncelikle başlangıç sarımlarının M-S-L olarak işaretlenmiş rölenin sarımı üzerinden sürülerek ilk kalkışı yapması ile başlar. İlk hareketinde çok akım çeken kalkış motoru rölenin çekmesine neden olur ve dönmeye başladığında çektiği akım düşer, akım düşünce role çekmeyi bırakır ve hareketin devamlılığı sağlanmış olur.
Ekvatoryal hareketi sağlayan parçalar ve kullanımı şu şekildedir;
- Ekvatoryal hareket anahtarı açılarak ekvatoryal senkron motorun ilk kalkış için enerjilenmesi sağlanır,
- Hızlı ileri -geri hareketi sağlayan ikinci motorun herhangibir hareket yapmaması amacıyla bu motoru enerjileyecek olan 3 konumlu (1-0-2) anahtarı 0 pozisyonunda olmalıdır, böylece bu motora enerji gitmeyecektir
- Aşağıdaki şekilde görülen kavrama kolu vidası gevşetilerek üst dişliye geçirilecek ve vida tekrar sıkılacaktır. Bu kavrama kolunun görevi anteni hareket ettirecek olan ana dişliye hangi motorun gücünün uygulanacağını belirlemektir. Kavrama kolu yukarı dişliye yaslandığında ekvatoryal hareketi yapan motor yükü üzerine alacaktır, kavrama kolu aşağıdaki dişliye yaslandığında ise hızlı (1-02 anahtarının konumuna uygun olarak hızlı veya çok hızlı) hareket motoru yükü üzerine alacaktır. Aşağıdaki şekilde kavrama kolu ve dişliler gösterilmiştir;
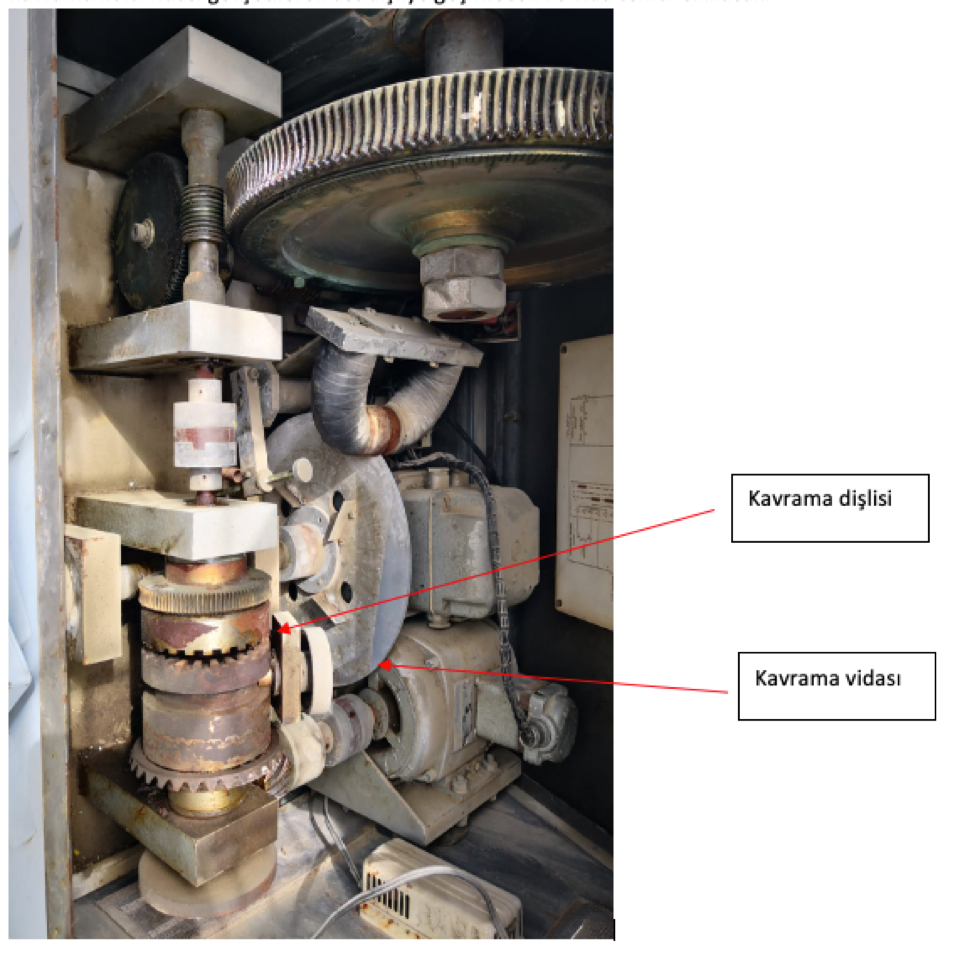
Şekil 4 Kavrama kolu ve dişliler
Yapılan çalışmalar esnasında herhangibir malzeme yenilemesine gerek olmaksızın birtakım temizleme ve düzenleme faaliyetleri ardından bu hareket sorunsuz olarak çalıştırılabilmiştir.
3.2 HIZLI İLERİ-GERİ EKVATORYAL HAREKET
Yaptığımız kontrollere anteni hızlı olarak doğu ya da batı yönünde hareket ettiren sistemin motorunun çalışmadığı, ancak motor elle tahrik edildiğinde döndüğü gözlemlenmiştir.
Kullanılan motorun özellikleri aşağıdaki tabloda verilmiştir;
Tablo 1 –Hızlı ekvatoryal ileri-geri hareket motoru özellikleri
| Üretici | Brown-Boveri |
| Besleme Voltajı | 220 VAC |
| Besleme Frekansı | 50 Hz |
| Gücü | ¼ hp |
Motorun içinde bir ana sargı ve bir yardımcı sargı vardır. Yardımcı sargıya çok kısa süreli (örneğin 1sn kadar) gerilim uygulanarak motor kalkışı sağlanmaktadır. Bu ilk kalkışı sağlamak ve daha sonra devreden çıkmasını sağlama görevi, üzerinden seri olarak akım akıtılan rolelerdedir. Yardımcı sargıya uygulanan voltajın yönü değiştirilerek motorun yönü de değiştirilebilmektedir. Yardımcı sargıya gerilimin uygulama yönü 1-0-2 şeklinde kodlandırılmış olan ve iç yapısı aşağıdaki gibi olan çoklu komütatör ile sağlanmaktadır;
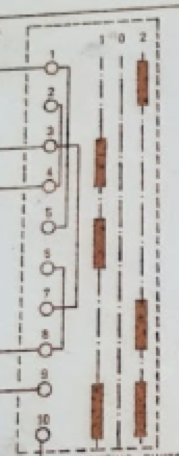
Şekil 5 1-0-2 Komütatör İç Yapısı Şeması
Yardımcı sargıyı devreye sokmak için ana sargıya seri olarak bir akım rölesi kullanılmıştır. Rölenin kontakları normalde açık NA pozisyonundadır. Ana sargıya gerilim uygulandığında, ana sargıdan geçen akım, akım rölesinden de geçmekte ve kontakları kapalı hale gelmektedir. Kapanan kontaklar üzerinden yardımcı sargıya da enerji uygulanmakta ve motor yardımcı sargıya uygulanan voltajın yönüne bağlı olarak dönmeye başlamaktadır. Motor devrini aldıktan sonra üzerinden geçen akım düşmekte, düşen akımdan dolay akım rölesi kontakları açık pozisyona geçmekte ve motor dönmeye devam etmektedir.
Motorun böyle çalışması beklenirken dönmeye başlamamasından dolayı elektrik sistemi ana kutu kapağında bulunan şemaya göre incelenmiştir. Arızalanabilecek tüm parçalar ve bağlantılar gözden geçirilmiştir.
1-0-2 anahtarının yapılan incelemeler ve testler sonrasında sağlam olduğu gözlemlenmiştir.
Motor sökülerek atölye şartlarında test edilmiş ve sağlam olduğu görülmüştür. Kalkış anında 2,7A ve normal çalışmada 1,6A akım çekmekte olduğu kaydedilmiştir.
Akım rölesinin arızalı olduğu tespit edilmiştir. Piyasadan benzer röleler temin edilmiş ancak gerek mekanik problemlerinden gerekse uygun sarım sayılarına sahip olmadıklarından kullanılamamıştır. Sistemin yaşı göz önüne alındığında orijinal parça bulmanın mümkün olamayacağı değerlendirilmiştir. Bunu üzerine akım rölesi iptal edilerek yardımcı sargıya 1sn enerji verecek bir adet zamanlama rölesi eklenmiştir. Bu zaman rölesi aşağıdaki şekilde gösterilmiştir;

Zaman rölesi 1-0-2 anahtar kapağı üzerine ray takılarak uygun şekilde montajı yapılmıştır.
Diğer bir husus da anten limit anahtarlarından birinin arızalı olduğu görülerek yenisi ile değiştirilmiştir.
Olası hatalı/kopuk teller için tüm bağlantılar tekrar gözden geçirilmiş eskimiş yıpranmış soket bağlantıları yenilenmiştir.
Motor test edilerek başarı ile çalıştığı gözlemlenmiştir.
Yapılan eklenti aşağıdaki şekilde gösterilmiştir;
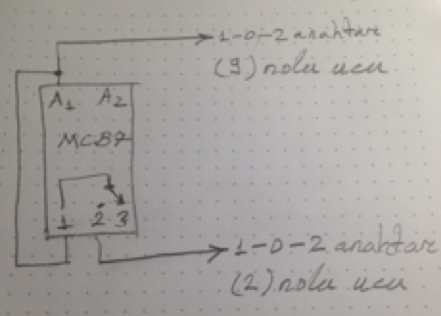
Şekil 7 Eklenen Zaman Rolesi Bağlantı Şeması
Antenin hızlı olarak ileri veya geri yönde hareket ettirilebilmesi için izlenmesi gereken adımalar aşağıdaki gibidir;
- Ekvatoryel hareket anahtarının kapalı konuma getir,
- 1-0-2 anahtarı 0 pozisyonunda olmalı,
- Kavrama vidasını gevşet ve alt dişliye geçirerek vidayı tekrar sık,
- 1-0-2 anahtarını 1 ya da 2 pozisyonuna al ve motorun dönüşünü sağla, antenin hareket ettiğini kontrol et,
- Anteni diğer yöne çevirmek için 1-0-2 anahtarını 0 pozisyonuna al ve motor tam durana kadar bekle. (Motor tam durmadan diğer pozisyona alırsanız motorun doğasından ötürü aynı yönde dönmeye devam edebilir.) Motor tam durduktan sonra 1-0-2 anahtarını diğer pozisyona al.
- Anten hareket sistemi üzerinde iki adet limit anahtarı vardır. Bunlar antenin aşırı uca gitmesine engel olmak için ekvatoryal ya da sağ-sol motorlarının elektriğini kesmektedir. Böyle bir durumda aktif durumdaki motoru kullanarak yada elle döndürerek limit anahtarı kesmesinden kurtulabilirsiniz.
Hızlı sağ sol mekanizmasının yapısından dolayı (kavrama kolunun ve gerekli şaft hareketi) otomatik hale getirmek mümkün görünmemektedir. Ancak ana şaft tahriği doğrudan linear yada bir step motor ile sürülürse mümkün olabileceği değerlendirilmiştir.
Sisteme aşağıdaki malzemeler eklenmiştir;
- 1 adet zaman rölesi – MCB-7
- Kablo,
- Klemens,
- Soket
4. BAKIM
Sistemin tekrar çalıştırılması esnasında aşağıdaki malzemeler ile bakım yapılmış olup sistemin daha uzun yıllar ayakta kalabilmesini sağlamak amacıyla aşağıdaki malzemeler ile bakım yapılması önerilir.
Yağlama malzemeleri:
- Förch S411 pas sökücü
- Förch S402 sıvı gres
- Förch S485 lityum tabanlı gres (-30, +125 derece
5. SONUÇ VE ÖNERİLER
Bu doküman kapsamında da anlatıldığı şekli ile Ankara Üniversitesi Kreiken Rasathanesi’nde bulunan radyo teleskop anteninin mekanik aksamları ilk günkü çalışma prensiplerine uygun olarak yeniden hayata geçirilmiştir.
Mekanik yapı ardından anten ve alıcı çalışmaları da tamamlanarak sistemin yeniden aktif edilmesi sağlanabilecektir.
Bu dokümanın “Bakım” başlığı altında belirtilen malzemeler ile peryodik olarak bakımının yapılması durumunda çalışmasına daha uzun yıllar sağlıklı bir şekilde devam edebileceği değerlendirilmektedir.

Muhteşem gerçekten senelerin cihazı sitenizi çok beğeniyor ve sürekli takip ediyorum saygılar.
Merhaba. Nredeyse 70 yıllık bir cihazın günümüzde faal durumda çalışır olması çok güzel inşallah sorunsuz bir şekilde çalışır ve çalışmaya devam eder.