
Sanırım birçok kişinin merakla beklediği ve içeriğinde akıllı telefon barındıran STRaND-1, bize oldukça ilginç bir inceleme yazısı çıkaracak. Aslında 1U formunda olan PhoneSat’ı kaleme alacaktım ancak bu hem daha büyük (3U) hem de yeni teknolojiler barındırmakta. PhoneSat bir sonraki yazıya kaldı kısaca. Aslına bakarsanız bu uyduya; “telefonlu uydu” mu desem, yoksa “uydulu telefon” mu desem bilemedim. Kısacası ikisinden de ortaya karışık bir ürün denilebilir. Şaka bir yana bu uydunun üzerinde bulunan diğer deneysel modülleri, bana göre gelecekte kullanılabilecek teknolojiler bakımından herkesçe bilinen akıllı telefon modülünden çok daha önemli.
STRaND-1’i imal eden ekip aslında Adroid işletim sistemi kullanan bir telefonu standart bir uydu formuna yerleştirerek ona birtakım işleri yıkıp maliyeti ucuzlatmayı planlamış. Eğer uygulamalar başarıyla çalışırsa İngilizler bir anlamda bunu kanıtlamış olacaklar.
Görünür halde çalışmaması için de bir sebep yok. Ayrıca bu sistem çok da yeni bir deneme değil. 2006 yılında bu tür çalışmaların ilk temellerini duble küp uydu olarak da anılan Cute1.7 (AO-56) uydusunda, Hitachi NPD-20JWL marka PDA kullanarak Japonlar atmıştı.
Pek tabi bu ilk örnekti ve bugün bir Adroid’in işlem gücü ve hızı ile kıyaslanamaz, biz konumuza devam edelim ve STRaND-1’den beklentiler neymiş ona bakalım. Uydudan beklenen getiri kısaca şu şekilde sıralanmış;
Amaç ve beklentiler
1. SSTL personeli için mühendislik deneyimi kazandırmak, SSC ile ilişki ve bilgi paylaşımını geliştirmek, bazı operasyonel telemetre verisi gönderimini test etmek,
2. Bir veya daha fazla görev yükü (payload) ile çalışma, hızlı geliştirme ve inşaa süreci, yörüngede teknik bir risk olduğunda neler yapılabilecekleri görmek,
3. Bileşenlerinin uzay misyonlarında ticari kullanımının araştırılması şeklinde belirlenmiş.
Diğer yandan uydunun bilmek isteyebileceğinizi düşündüğüm diğer bilgileri aşağıda maddelendirdiğim gibi.
Genel tanımlama bilgileri
Uydu Adı: STRaND-1.
Organizasyon: University of Surrey’s Surrey Space Centre (SSC) ve Surrey Satellite Technology Limited (SSTL).
Uydu Tipi: 3U yapıda küp uydu (Pumpkin 3U Kit).
Uydu Ağırlığı: 4.3 Kg.
Fırlatma Merkezi : Satish Dhawan Uzay Merkezi, Sriharikota/Hindistan.
Fırlatıcı: Polar Satellite Launch Vechicle (PSLV).
Yörünge Yüksekliği: 780 Km.
Genel yapı
Uydu 3U’lık bir alan kaplamaktadır ki bu da kabaca 10x10x30 cm. lik bir taşıyıcı gövde olarak aklınızda şekillenebilir. Üst kısımda haberleşme ve anten donanımı, orta kısımda kamera ve diğer elektronik sistemler, alt kısımda ise telefonun yerleştirildiği bölüm ve onun da altında itki sisteminin yerleştirildiği görülmektedir.
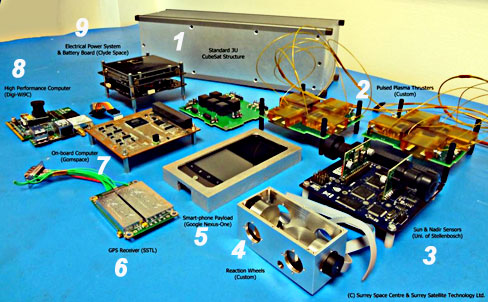
Resim-1. © Image credit: Surrey Space Centre & Surrey Satellite Technology Ltd.
1. Ana taşıyıcı gövde.
2. Plazma iticiler.
3. Güneş ve Nadir sensörü.
4. Reaksiyon diskleri.
5. Google Nexus Obe cep telefonu.
6. GPS alıcı.
7. Uçuş bilgisayarı (OBC).
8. Yüksek performanslı bilgisayar.
9. Elektrik güç ve batarya sistemleri.
İncelemeye geçmeden önce bir de uydu üzerindeki ana işlev parçalarına bir de yakından kısaca göz atalım ki sonradan anlatım içinde ne nedir akılda kalsın, karışmasın.
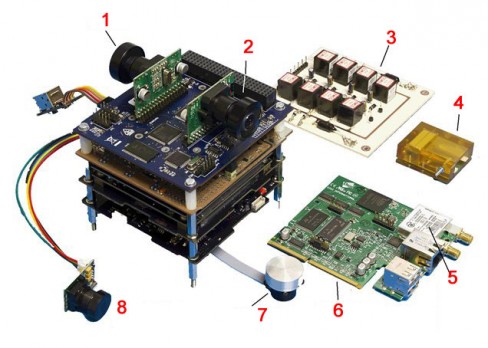
Resim-2. © Image credit: Surrey Space Centre & Surrey Satellite Technology Ltd.
1. Güneş sensörü.
2. Nadir sensörü (Dünya ufuk sensörü).
3. Darbeli (atımlı) plazma iticileri güç modülü.
4. Darbeli (atımlı) plazma itici elektrotları.
5. WiFi alıcı verici (Mobil telefonla iletişim için).
6. Yüksek performanslı bilgisayar kartı.
7. Fırçasız motora bağlı rotasyon diski (60 saniyede maksimum 5.000 Rpm dönüş hızı).
8. VGA kamera (Mobil telefonun ekranını izlemek için).
Genel yapı ile ilgili söylenecekler bu kadar, şimdi biraz uyduyu kurcalayalım ve modüllerin işlevselliğini inceleyelim. Modüllerin genel yapı içerisindeki kütle dağılımına baktığınızda durum şöyle. Güç bileşenleri %7, faydalı yük bileşenleri %13, haberleşme uygulamaları %10, itki sistemleri ise %17’lik bir yer tutmakta. Pek tabi ana yapı %30 gibi büyük bir dilime tekamül etmekte. Tüm bu modüllerin bir köle (slave) mantığında -I2CBus üzerinden- ana uçuş bilgisayarı tarafından denetlendiği görülmekte.
Uydunun yüklerinden biri olan akıllı telefonda uzay için çok da önemli değişiklikler yapılmamış. Bir taşıyıcı ve sabitleyici kullanarak ana gövdeye tutturulmuş telefonun kamera merceği uzay boşluğunu rahat görebileceği gibi yerleştirilmiş. Bu sayede Dünya ve Ay resimleri daha iyi çekilebilecek. İyi resim elde edilebilmesi pek tabi uydunun yönlendirilmiş olmasına bağlı. Bu işi de Güneş ve Nadir sensörlerinden alınan konum bilgilerine göre iticiler kullanılarak gerçekleştirilecek. Muhtemelen en ilginç resimler görev bitimi atmosfere girip yanmadan hemen önce çekeceği resimler olacak.
Tabi bir yandan resim çekilirken öbür ekipmanlar boş durmayacak ve diğer yandan da yörüngede bulunduğu sürece telefon etrafında oluşacak manyetik alanlar kaydedilecek. Bu çalışmanın amacı da Alfvén (*) dalgalarını algılama gibi daha ileri bilimsel çalışmalar için bilgi edinmek. (Alfvén dalgaları; 10 Hz’nin altında çok alçak frekanslı elektromanyetik dalgalardır. Bu dalgalar manyetohidrodinamik bir süreç izleyerek plazmalarda (manyetosferler, yıldız atmosferleri vb.) yayılabilecek yetenektedirler. Güneş ile ilgili olarak da Alfvén dalgaları dışında tüm dalgaların koronaya ulaşmadan önce dağıldıkları ortaya çıkarılmıştır.)
Haberleşme sistemleri
Uydunun haberleşme sistemleri de ilginç aslında. Bir WiFi sistemi haberleşme için kullanılmış. Görev boyunca Dünya ile uydu arasındaki WiFi haberleşmesinin SSTL’de bulunan S-Band çanak anten ile sağlanması öngörülmüş.
Telefonun kendi üzerindeki WiFi sistemi de unutulmamış. Google Nexus One telefonda; Snapdragon Processor- Client: Terminal scripts Linux 2.6 ve Adroid, ivme ölçer, manyetometre, kamera dahili olarak bulunmakta. Bu sistemler de HPC kart anabirimine USB-USB olarak ve gerektiğinde de WiFi (IFFF 802.11) üzerinden iletişim kuracak şekilde planlanmış.
Diğer yandan VHF/UHF amatör band frekanslarının kullanımı için de IARU ile frekans koordinasyonu tamamlanmış ve IARU downlink için kendilerine 437,575 MHz ve uplink için 145,860 MHz frekans tahsisi tavsiye etmiş. Uydu geliştiriciler de bu doğrultuda amatör band haberleşme sistemini VHF uplink – UHF downlink şeklinde yapılandırılmış. Geri kalan haberleşme detaylarına çok da girmiyorum, zaten geri kalan standart uygulamalar (watchdog devresi vb) bu uyduda da mevcut.
Atımlı (darbeli) plazma itici sistemleri
Uyduda iki ayrı itiş sisteminin de yörüngede denenmesi planlanmıştı. Bunlardan biri Warp Drive olarak adlandırılan su ve alkol karışımlı bir itici, diğeri de PPTs olarak adlandırılan darbeli (atımlı) plazma itici. Warp Drive bir modül şeklinde ve alt itici kısmında 0.2mm bir plazma çıkış deliği bulunmakta. Görevin ilk bölümünde SSC’nin geliştirdiği yüksek hızlı Linux tabanlı uçuş bilgisayarı, bilahare asıl heyecanla beklenen itki sistemi test edilecek.
İtici sistem bünyesinde bulunan TM1 ve TM2 iticileri, atımlı plazma itici sistem (PPT) içerisinde bulunan atımlı güç ünitesi (PPU) tarafından kontrol edilmekte. Strand-1 sekiz mikro-iticileri iki boyutlu hem de yanal hareket olarak üç eksende rotasyon sağlanması ile de şimdiye kadar yapılmış en yüksek manevra kabiliyetine küçük uyduların arasında yer aldığını söylemeden geçemeyeceğim.
Galaxy Nexus One telefonu
Uygulamada seçilen telefon Android işlemcili bir Galaxy Nexus One. HTC marka (Google Nexus One / HTC Nexus One model) telefon 512MB dahili, 32GB arttırılabilir belleğe sahip telefon 130 gram ağırlığında ve 119×59,8×11,5 mm. ebatlarında. Telefonun bazı parçaları değil yapısı bir bütün olarak uyduya monte edilmiş.
Telefondaki işlemci gücü burada ön plana çıkıyor. Delfi C3, Delfi N3XT, Cute1.7 APDII, CanX-2 uyduları ile kıyaslandığında ve ARM işlemcinin 1000 MHz saat hızıyla karşılattırıldığında diğerlerinin (7.4 ile 400 MHz.) oldukça önünde yer almakta.
1 GHz işlemci hızları ve dahili kadar arttırılabilir bellekleri ile bu tür akıllı telefonlar oldukça popüler olarak görünse de; uydu sadece akıllı telefon yerleştirmekle “akıllı” olmuyor maalesef. Yine ardında bir yığın emek ve iş gücü, titiz bir planlama ve çalışma süreci gerekli ki bunda da epey uğraşılmış.
İlginç bir diğer detay da telefon ekranının kapatılmamış olması. Hatta görev boyunca ekranı da aktif olarak kullanılacak. HPC modülünün iç tarafında yerleştirilmiş olan telefonun ekranı da ayrı bir iç VGA kamera ile izlenecek.
Üreticileri madem akıllı telefon o zaman sosyal ağlardan da uzak kalmasın demişler. SSTL ve SSC geçen zaman içerisinde bu uydu ile ilgili olarak daha önce Facebook sosyal ağı üzerinde hangi akıllı telefon uygulamalarının yükleneceği konusunda bir yarışma düzenlemiş ve bu sonuçlara göre “Scream in Space!”, “iTesa”, “Postcards from Space” ve “360?” uygulamaları seçilmişti.
Yarışmayı bilenler için heyecanlı bir bekleyiş olacağı kesin görünüyor. Yörüngedeki uyduya sonradan uygulama yüklemek de mümkün tabi.
Tutum ve konumlama kontrol sistemleri
Uzayda bir uydunuz var ise onu basitçe istenilen bir konumda tutmak; uydunuz ister büyük ister küçük olsun, başlı başına bir iş. Uydu taşıyıcı kutusundan ayrıldıktan sonra başlayan istemsiz dönme (spin) hareketini durdurmak için bir takım aktif ve pasif tutum kontrol sistemlerine ihtiyaç duymanız kaçınılmaz. İlk yapmanız gerekenlerden biri uydunuzun kendi etrafındaki dönüş (açısal) hızını sıfıra indirmek ve yörünge izinde kararlı bir konumda tutmaktır.
Tabi bu çalışma sadece ilk konumlama için. Özel görev yüklediğiniz (fotoğraf çekimi vb.) bir uydunuz var ise bu kez de uydunuzu belirli zamanlarda sizin istediğiniz konuma göre döndürmeniz gerekecektir. Bu durumda da devreye Resim-1 ve Resim-2’de görünen rotasyon tekerleri girmekte. İncelediğimiz uydudaki diskler 60 saniye içinde 5 bin devir gibi yüksek bir hıza çıkabilmektedir.
Bu rotasyon disklerinin yaptığı işe aslında pek de yabancı değiliz. Bir bisiklet tekerinin milinden tutup elinizde çevirirken onun ekseni etrafında sağ-sol yaptırmak istediğinizde nasıl bir engelleme ile karşılaşırsanız bunda da yapılan iş tam tersi. Daha basit bir örnek vermek gerekirse bilek kaslarını kuvvetlendirmeye yarayan avuç içinde hızla dönen aletleri sayılabilir.
Tabi tüm bunları sağlıklı bir şekilde yerine getirmeniz uydu sensör sistemi ile sağlıklı ve hızlı bir haberleşme sayesinde mümkün. Konumlama için kullanılan sensörlerden biri Güneş diğeri ise Nadir sensör.
Nadir sensör ile Güneş sensörü bir nevi sırt sırta vermiş şekilde kart üzerinde bulunmaktadır. Bu sayede konuma göre 90 derece gök hizası (-Z), Nadir ise tam zıttı 90 derece yer yani Yer’in merkezinden geçen hiza (+Z) olarak tanımlanmıştır.
Güneş ve Nadir sensörü bir Alanda Programlanabilir Kapı Dizileri (Field Programmable Gate Array-FPGA imaj) işlemcisi tarafından denetlenmektedir.
Güç sistemleri
Telefon uyduya yerleştirilmeden önce yapılan vakum testlerinde bir sorun yaşanmamış. Aynı şekilde termal ısı testlerinden de geçmiş ancak telefonun aşırı soğuklarda otomatik kapanma hassasiyeti nedeniyle ısıtma sorunu gözlenmiş. Bu ısıtma işlemi de harici ısıtma birimleri (yastığı) yerine işlemciye yoğun bir iş rutini yükleyerek ısıtma şeklinde planlanmıştır. Yerde olsa telefon bu ısınmadan dolayı epey şikayet alırdı herhalde. Neyse ki uzay güneşi görmüyorsanız kelimenin tam anlamıyla buz gibi.
Uydu fazladan konuşlandırılabilir (açılır) iki güneş paneline sahip. Paneller uydu formunun uzun kenarı boyunca uzanan bir menteşe sistemine bağlı olarak yerleştirilmiş. Bu sayede bir anlamda nominal oryantasyon sağlanmış. Panellerin bu şekilde seçilmesi ve yerleştirilmesi sadece güç elde edimi ile ilgili değil.
Diğer bir görevi de ileride görev bitimi atmosferik sürüklenmeyi arttırmak ve uydunun kendi etrafından dönüşüne yardımcı olmak. Bunu bir anlamda uçağı frenleten flaplar ve kendi ekseni roketin kendi etrafında dönüşünü sağlayan küçük kanatçıklar gibi de düşünebilirsiniz.
Güç olarak 10watlık peak güç yanında yörüngede ortalama 3Watttlık güç kullanılması düşünülmüş. Bu güç güneş panellerinin güneşe yönlendirilmesiyle 5.8Watt’a kadar çıkabileceği hesaplanmıştır. Clyde Space ürünü (EPS) ile kontrol edilen ve yine aynı firma ürünü olan Lityum batarya serisi ana yapıyı güç bakımından desteklemektedir. ESP içerisinde ayrıca batarya şarj koruma, aşırı akım koruma ve EPS telemetre birimi bulunmaktadır.
GPS modülü
Telefon üzerinde GPS olmasına rağmen bu LEO irtifada pek tabi kullanılmamaktadır. Bunun yerine uyduda SSTL SGR-05U isimli bir modül kullanılmış. Zaten bu modül, özellikle alçak yörüngedeki (LEO) nano uydu çalışmaları için tasarlanmıştır. GPS dizaynında, minimum ebat ve düşük güç tüketimi de göz önüne alınarak, 12 kanal GPS alıcısının temel bileşenleri ile anten sistemi baz alınmış.
Uygun bir şekilde çalışması için gerekli olan yama (patch) anten de ana taşıyıcı yapı üzerinde yerleştirilmiş. 70x45x10 mm ebatlarında ve -20 derece ile +50 derece arasında operasyonel çalışma sıcaklığı olan modülün ağırlığı ise sadece 20 gram ve yörüngedeki faydalı ömrü 3 yıl ve üzeri olarak belirtilmiş.
Uçuş bilgisayarı
GomSpace ürünü uçuş bilgisayarı yapısı bir PC104 formu üzerinde. Kart üzerinde bir ARM-7 (40 Mhz, 2 MB RAM, 8 MB Flash, I2C, üç eksenli ivmeölçer ve manyetometre ihtiva etmekte.
Video. Üretim laboratuvarı.
Strand-1’in incelemesi kısaca böyle. Uydu artık fırlatmak için gün sayıyor. Bir aksilik olmaz ise 25 Şubat’ta fırlatılacak. Sonrasında benim de merakla bekleyeceğim bir başka çalışma içeren Strand-2 gelecek. Strand-2, birinci uydunun devam serisi gibi de algılanabilir. Aslına bakarsanız bir ikiz uydu gibi davranacaklar demek yanlış olmaz.
Strand-2’ye herkesçe bilinen ve 2010 yılı son çeyreğinde piyasaya sürülen Kinect (ya da Project Natal) teknolojisini kullanarak yakın çevresini tarayacak ve üç boyutlu harita çıkaracak.
Bu sayede diğer uyduya yakınlaşması ve ona göre kendini konumlaması mümkün olabilecek. Bu başarıldığında uzay mühendisliğinde apayrı bir heyecan yaşanacak. Çünkü bu projenin başarılması demek blok şeklindeki uyduların görev yapmasının, ölü konumdaki bir uyduya veya uzay çöpüne ya da onarılacak bir uyduya kenetlenme konusunda çok büyük bir bilgi birikimi sağlayacak.
Bu da büyük maliyetli onarım işleri yerine küçük uydulu robotik örümcek tamirciler çağını açacak. Bekleyelim ve hep birlikte görelim. Başka bir uydu incelemesinde görüşmek üzere.
Referanslar:
http://www.sstl.co.uk/Missions/STRaND-1
http://en.wikipedia.org/wiki/STRaND-1
https://www.facebook.com/nanosats
https://twitter.com/SurreyNanosats
tr.wikipedia.org/wiki/Kinect

Detaylı çalışmanız için sizi tebrik ederim. ilgiyle okudum ve arşivime kaydediyorum paylaştığınız bilgileri. İyi çalışmalar dilerim.
Teşekkürler, selamlar.