
23 Nisan 1920’de Türk milletinin iradesini temsil eden Birinci Büyük Millet Meclisi’nin açıldığı ve Türk Halkının egemenliğini ilân ettiği tarihtir. 23 Nisan...

18 Mart Çanakkale Zaferi ve Şehitleri Anma Günü
Sabitlenmiş Yazı
TAMSAT Ailesi olarak; 18 Mart Çanakkale Zaferi ve Şehitleri Anma Günü’nün yıldönümünde, başta Gazi Mustafa Kemal ATATÜRK ve büyük destanın mimarı şehitlerimiz...
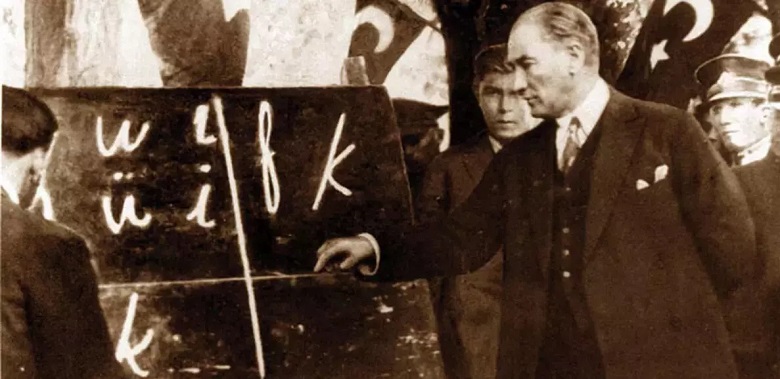
Öğretmenler Günü Kutlu Olsun
Sabitlenmiş Yazı
Pek çok ülkede 1994’ten beri her yıl 5 Ekim günü UNESCO tavsiyesiyle “Öğretmenler Günü olarak” kutlanmaktadır. 5 Ekim günü, 1966 yılında Paris’te...

TED Ankara Koleji Ortaokulu Uzay Etkinliği
Sabitlenmiş Yazı
TAMSAT; TED Ankara Koleji Ortaokulu‘nda “Uzay Etkinliği” ile 5 ve 6’ncı sınıf öğrencileri ile buluştu. 18 Ekim 2024’te düzenlenen etkinlikte TAMSAT, Başkent...