
Model PLSS/Elektronik/İç ve Dış (Atmosfer) Isı Sensörleri. Hassas bir yaşam desteğine ihtiyaç duyan astronotlar için ciddi ısı sorunlarının yaşanmaması için uzay elbiselerinin çeşitli koruyucu donanım ile desteklendiğini daha önce belirtmiştik. Bu nedenle sıcaklık değerlerinin bilinmesinin önemi de kendiliğinden ortaya çıkmaktadır. Model PLSS uygulamamızda da YM7XKA astronotunun vücut sıcaklığının ölçülerek, değerlerin Model Görev Kontrol Merkezi (MGKM)’ne anlık olarak gönderilip izlenmesi için 2 adet ısı sensörü kullanılmıştır.
Uygulamamızda sensörlerden 1 adedi YM7XKA astronotunun beden sıcaklığının ölçülmesi için kask içine, 1 adedi ise varsayılan Mars atmosferinin sıcaklık ölçümü için PLSS’ye yerleştirilmiştir.
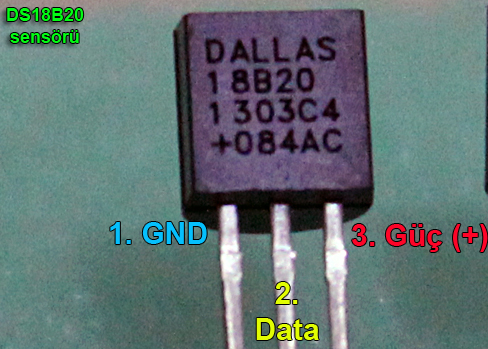
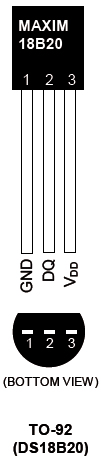
Resim-1. DS18B20 sıcaklık sensörünün genel görünümüve pin ağlantıları.
Model PLSS içerisine yerleştirilen ısı sensörü kapalı, ancak hava alabilen çanta yapısı içine özellikle yerleştirilmiştir.
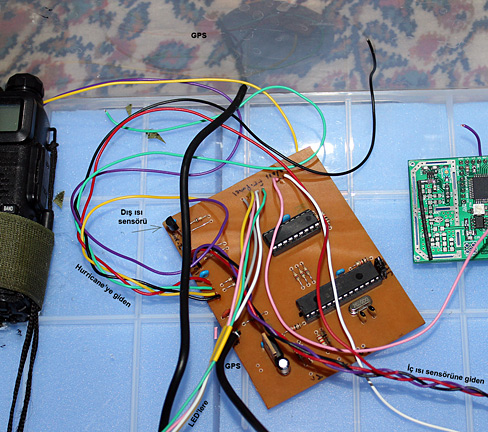
Resim-2. Model PLSS içinde buluan PCB üzerinde sol üst köşeki DS18B20 sensörünün konumu.
Bu sayede gerek dış ortam ısısı ve gerekse devrelerde, batarya ve benzer sistemlerde öngörülemeyen bir sıcaklık yükselmesinin önceden ve anında fark edilerek astronotun korunması amaçlanmıştır.
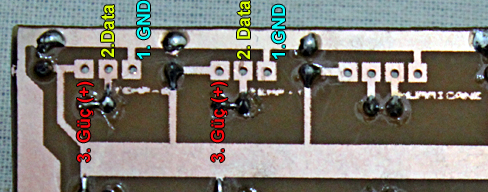
Resim-3. Sıcaklık sensörlerinin PCB üzerindeki bağlantı pinleri. Soldaki pinler dahili, sağdaki pinler harici sıcaklık sensörü içindir.
Sensör olarak her bir ısı değeri için harici bir donanım gerektirmeyen düşük enerji gereksinimli “DS18B20” ısı sensörü kullanılmıştır. DS18B20’ler iç/dış sıcaklık değerlerini ölçerek PCB üzerinde bulunan PIC18F2620 entegresine iletmektedir.
PIC18F2620 programlandığı üzere sensörlerden topladığı “One Wire Interface” standardındaki veriyi yorumlayarak dijital formatta TROY/Hurricane UHF Telemetre verici modülüne aktarmaktadır. Aktarılan değer bilgisi aşağıda görüldüğü şekildedir.
[snippet id="1962"]
Hurricane’deki dahili modem de; GPS, batarya durum, oksijen durum bilgisi ile birlikte, aldığı bu 2 sıcaklık verisini kullanıcı tarafından programlandığı zaman aralığında merkezi istasyona radyo frekans (RF) üzerinden 250-400 milisaniye gönderme (TX), 1,5 saniye bekleme (Standby) ile otomatik olarak göndermektedir.
[snippet id=”1961″]
Telemetre verisi akışı içerisindeki sıralamada sıcaklık değerleri; alınan ilk veri satırından sonra “TEMP1” ve “TEMP2” olarak güncelleme zamanı 5 ve 6’ıncı satır/saniyedir.
Lokal Mars Projesi (LMP) çalışma planı çerçevesinde Model Görev Kontrol Merkezi (MGKM) görev boyunca sürekli olarak YM7XKA astronotlarının verilerini kontrol etmektedir. Bu merkezde sağlık uzmanı olarak görevlendirilen bir ekip üyesi de yardımcı görev ekibi ile birlikte astronotların görev çıkış hazırlığına nezaret etmektedir. Bu hazırlık esnasında elektronik aletlerle astronotların genel durum, nabız ve tansiyonları ölçüp not almakta, “YM7XKA-Astronot Kimlik Tanım Formu”na işleyerek görevi onaylanmaktadır.
Görev esnasında ise elindeki formda bulunan değerler ile sıcaklık sınır değerlerini yorumlamakta, izin verilen maksimum üst limite ulaşması durumunda görevi iptal ederek astronotların elbiseden çıkarılmasını sağlamaktadır. Proje senaryosunda izin verilen değerler astronot iç sıcaklığı için terleme durumu da göz önüne alınarak 38, dış sıcaklığı için ise maksimum 35 santigrad derecedir.
Lokal Mars Projesi (LMP)’de kullanılan tek hatlı dijital sıcaklık sensörü olan DS18B20’nin genel özellikleri ise aşağıda sıralanmış şekildedir.
– Çalışma Voltajı aralığı 3.0V – 5.5V,
– ± 0.5 ° C hassasiyet -10 °C +85°C,
– Mikrodenetleyici ile “1 Wire” arayüzünü ve tek port kullanarak bir hat üzerinden haberleşme,
– 12bit çözünürlüğe sahip -55C ile 125C (+/-0.5C) sıcaklık değeri arasında çalışabilme,
– Her sensör içinde bulunan 48bit (8 bit CRC kodu + 48 bit seri nu + 8 bit aile kodu) seri koda eşsiz bir 64-Bit seri numarası ile aynı hat üzerinde birden fazla aygıtla haberleşebilme,
– Datasheet: http://datasheets.maxim-ic.com/en/ds/DS18B20.pdf
Model PLSS/Elektronik/Elektriksel Güç (Besleme) Ünitesi
Klasik bir uzay giysisinde güç bütçesi PLLS’de bulunan kuru tip bataryalardan sağlanmaktadır. Bu bataryaların ürettiği güç, görev ve PLSS’nin tipine göre değişiklik arz etmekte olup görev dönüşü mekik veya uzay aracı içerisinde yeniden şarj edilmektedir.
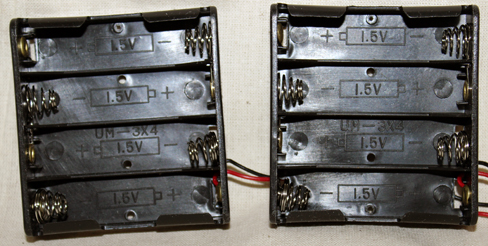
Resim-4. Pil bloğunun görünümü.
Model PLSS için gerekli elektrik gücü de benzer şekilde; iç orta kısımda 2×4’lük pil yuvasında bulunan 1.2V şarjlı pillerden oluşan batarya sistemi ile sağlanmaktadır. Bu sistemin ürettiği güç, ana sesli haberleşme sistemi olan amatör telsiz dışında kalan bütün sistemi destekleyebilmektedir. Özellikleri ise aşağıda görüldüğü üzeredir.
Toplam Pil : 8 Adet
Tipi : AAA Şarj edilebilir tip
Voltaj : 1,2V
Amper : 900mA/h
Toplam Voltaj : 9,6V
Toplam Akım : 900 mA/h (Piller seri bağlı olması sebebiyle Amper sabit)
Bir batarya ünitesinden (2 blok x 4 pil) üretilen toplam güç için formül : P (Güç) =I (Amper) x V (Volt)
P=9,6V x 900mA/h
P=8.640mW/1.000
P= 8.64W
Bataryanın üretimi : 900mA/h
PCB’nin çektiği akım: 300mA
Formül : Batarya Kapasitesi/Çekilen Akım = Çalışma Süresi
Sonuç : 900mAh/300mA = ~3Saat (*)
* Maksimum değerdir. Bu değer bataryayı oluşturan pillerin nitelikleri ve sistem verimliliğine bağlı olarak değişebilir. Ayrıca şarjlı pillerin zamanla kapasitelerinin azalması nedeniyle kullanım ömrüne bağlı olarak bu değer azalacaktır.
Batarya çıkışları V1 analog voltaj girişine de bağlı olup, voltaj bilgisi TLM olarak Model Görev Kontrol Merkezi (MGKM)’ne aktarılmaktadır. Bu konu, aşağıda Model PLSS batarya voltaj ölçüm sistemi içerisinde detaylı olarak anlatılmıştır.
Model PLSS/Elektronik/Batarya Voltaj Ölçüm
Model PLSS içerisinde bulunan elektriksel güç besleme ünitesinin durumu ile ilgili bilgi Model Görev Kontrol Merkezi (MGKM)’ne RF üzerinde telemetre (TLM) olarak aktarılmaktadır. Örnek mesaj;
[snippet id="1966"]
Devre yapısı ileride yapılacak eklemeler de düşünülerek 3 değişik analog voltaj değerine giriş sağlayacak şekilde dizayn edilmiştir. Voltaj ölçümü 3 kontrol ucundan yapılabilmekte olup, bunlar;
V1 Pin Giriş: 0-15V,
V2 Pin Giriş: 0-10V,
V3 Pin Giriş: 0-5 volta kadar girişleri ölçüm yapabilmektedir.
Şu an hali hazırda sadece 2×4’lük şarjlı kalem pil bloğundan oluşan bir güç besleme ünitesinin ana voltaj ölçüm değeri (V1) girişine bağlı olarak aktarılmakta olup, diğer 2 ölçüm noktası (V2 ve V3) boştadır. Aşağıdaki örnek mesaj satırında 3 girişe de voltaj uygulanmıştır.
[snippet id="1965"]
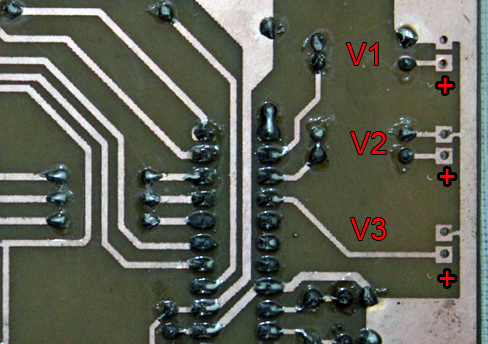
Resim-5. PCB üzerindeki voltaj pin bağlantıları.
PCB üzerinde V1, V2 ve V3 girişlerinden alınan analog voltaj verisi PIC18F2620 entegresinde dahili olarak bulunan Analog-Dijital Çevirici (Analog Digital Converter-ADC) ile 8 bitlik dijital formatta çevrilmekte daha sonra TROY/Hurricane UHF Telemetre verici modülüne aktarmaktadır.
[snippet id=”1968″]
Hurricane’deki dahili modem ise; GPS, ısı ve oksijen durum bilgisi ile birlikte aldığı bu 3 ayrı voltaj verisini kullanıcı tarafından programlandığı zaman aralığında merkezi istasyona radyo frekans (RF) üzerinden 250-400 milisaniye gönderme (TX), 1,5 saniye bekleme (Standby) ile otomatik olarak göndermektedir.
Yazı dizisinin diğer bölümleri:
Lokal Mars Projesi (LMP) 1.Bölüm / (Google Translate – English Lang.)
Lokal Mars Projesi (LMP) 2.Bölüm / (Google Translate – English Lang.)
Lokal Mars Projesi (LMP) 3.Bölüm / (Google Translate – English Lang.)
Lokal Mars Projesi (LMP) 4.Bölüm / (Google Translate – English Lang.)
Lokal Mars Projesi (LMP) 5.Bölüm / (Google Translate – English Lang.)
Lokal Mars Projesi (LMP) 6.Bölüm / (Google Translate – English Lang.)
Lokal Mars Projesi (LMP) 7.Bölüm / (Google Translate – English Lang.)
Lokal Mars Projesi (LMP) 8.Bölüm / (Google Translate – English Lang.)
Lokal Mars Projesi (LMP) 9.Bölüm / (Google Translate – English Lang.)
Lokal Mars Projesi (LMP) 10.Bölüm / (Google Translate – English Lang.)
Lokal Mars Projesi (LMP) 11.Bölüm / (Google Translate – English Lang.)
Lokal Mars Projesi (LMP) 12.Bölüm / (Google Translate – English Lang.)
[…] Lokal Mars Projesi (LMP) – 1.Bölüm – TAMSAT-Amatör Uydu Teknolojileri Derneği […] English Lang.) Lokal Mar […]
[…] Lokal Mars Projesi (LMP) – 1.Bölüm – TAMSAT-Amatör Uydu Teknolojileri Derneği […] English Lang.) Lokal Mar […]
[…] Lokal Mars Projesi (LMP) – 1.Bölüm – TAMSAT-Amatör Uydu Teknolojileri Derneği […] English Lang.) Lokal Mar […]
[…] Lokal Mars Projesi (LMP) – 1.Bölüm – TAMSAT-Amatör Uydu Teknolojileri Derneği […] English Lang.) Lokal Mar […]
[…] English Lang.) Lokal Mars Projesi (LMP) 7.Bölüm / (Google Translate – English Lang.) Lokal Mars Projesi (LMP) 8.Bölüm / (Google Translate – English Lang.) Lokal Mars Projesi (LMP) 9.Bölüm / (Google Translate […]